 |
PeriDyno 1.2.1
|
Loading...
Searching...
No Matches
|
PeriDyno 1.2.1
|
#include "Vector.h"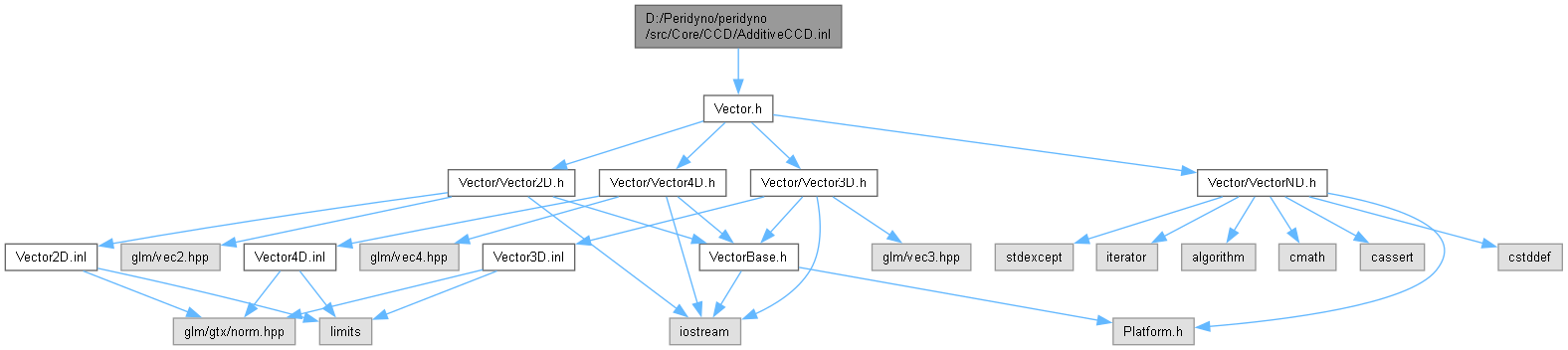
Go to the source code of this file.
Namespaces | |
| namespace | dyno |
| This is an implementation of AdditiveCCD based on peridyno. | |
Macros | |
| #define | REAL_infinity 1.0e30 |
| #define | REAL_EQUAL(a, b) |
| #define | REAL_GREAT(a, b) |
| #define | REAL_LESS(a, b) |
| #define | MAX_ITE (500) |
Functions | |
| template<typename T> | |
| DYN_FUNC T | dyno::getPoint2SegmentDistance (const Vector< T, 3 > &p, const Vector< T, 3 > &v0, const Vector< T, 3 > &v1) |
| template<typename T> | |
| DYN_FUNC bool | dyno::inTri (const Vector< T, 3 > &p, const Vector< T, 3 > &v0, const Vector< T, 3 > &v1, const Vector< T, 3 > &v2) |
| #define MAX_ITE (500) |
Definition at line 9 of file AdditiveCCD.inl.
| #define REAL_EQUAL | ( | a, | |
| b ) |
Definition at line 6 of file AdditiveCCD.inl.
| #define REAL_GREAT | ( | a, | |
| b ) |
Definition at line 7 of file AdditiveCCD.inl.
| #define REAL_infinity 1.0e30 |
Definition at line 5 of file AdditiveCCD.inl.
| #define REAL_LESS | ( | a, | |
| b ) |
Definition at line 8 of file AdditiveCCD.inl.