|
| DYN_FUNC | AdditiveCCD (T xi_, T s_, T tc_) |
| |
| DYN_FUNC | AdditiveCCD ()=default |
| |
| DYN_FUNC bool | VertexFaceCCD (const Vector< T, 3 > &x0, const Vector< T, 3 > &x1, const Vector< T, 3 > &x2, const Vector< T, 3 > &x3, const Vector< T, 3 > &y0, const Vector< T, 3 > &y1, const Vector< T, 3 > &y2, const Vector< T, 3 > &y3, T &time, T invL) |
| | Do a continuous collision detection between a vertex and a triangle.
|
| |
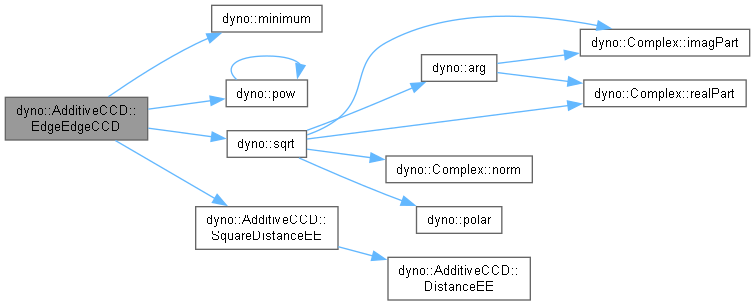
| DYN_FUNC bool | EdgeEdgeCCD (const Vector< T, 3 > &x0, const Vector< T, 3 > &x1, const Vector< T, 3 > &x2, const Vector< T, 3 > &x3, const Vector< T, 3 > &y0, const Vector< T, 3 > &y1, const Vector< T, 3 > &y2, const Vector< T, 3 > &y3, T &time, T invL) |
| | Do a continuous collision detection between two edges.
|
| |
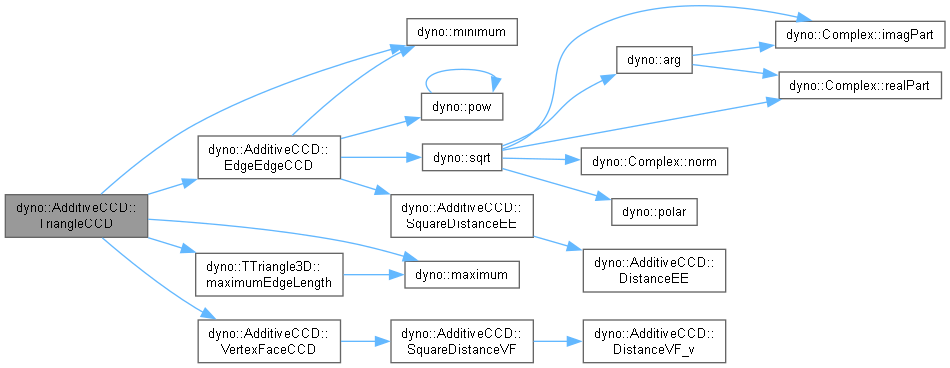
| DYN_FUNC bool | TriangleCCD (TTriangle3D< Real > &s0, TTriangle3D< Real > &s1, TTriangle3D< Real > &t0, TTriangle3D< Real > &t1, Real &toi) |
| | Do a continuous collision detection between two triangles.
|
| |
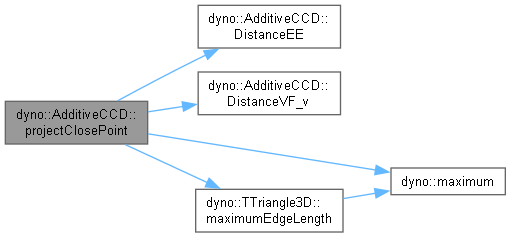
| DYN_FUNC void | projectClosePoint (const TTriangle3D< Real > &s, const TTriangle3D< Real > &t, Vector< T, 3 > &first, Vector< T, 3 > &second) |
| | find the close point between two triangles, store their barycentric coordinates ordered as vertex.
|
| |
|
| DYN_FUNC Vector< T, 3 > | DistanceEE (const Vector< T, 3 > &x0, const Vector< T, 3 > &x1, const Vector< T, 3 > &y0, const Vector< T, 3 > &y1, T *para) |
| |
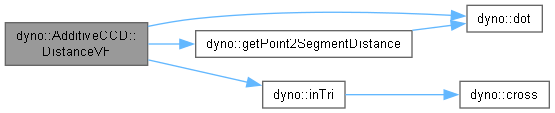
| DYN_FUNC T | DistanceVF (const Vector< T, 3 > &x, const Vector< T, 3 > &y0, const Vector< T, 3 > &y1, const Vector< T, 3 > &y2) |
| |
| DYN_FUNC Vector< T, 3 > | DistanceVF_v (const Vector< T, 3 > &x, const Vector< T, 3 > &y0, const Vector< T, 3 > &y1, const Vector< T, 3 > &y2, T *para) |
| |
| DYN_FUNC T | SquareDistanceVF (const Vector< T, 3 > &x0, const Vector< T, 3 > &x1, const Vector< T, 3 > &x2, const Vector< T, 3 > &x3) |
| |
| DYN_FUNC T | SquareDistanceEE (const Vector< T, 3 > &x0, const Vector< T, 3 > &x1, const Vector< T, 3 > &x2, const Vector< T, 3 > &x3) |
| |
template<typename
T>
class dyno::AdditiveCCD< T >
Definition at line 34 of file AdditiveCCD.h.