 |
PeriDyno 1.2.1
|
Loading...
Searching...
No Matches
|
PeriDyno 1.2.1
|
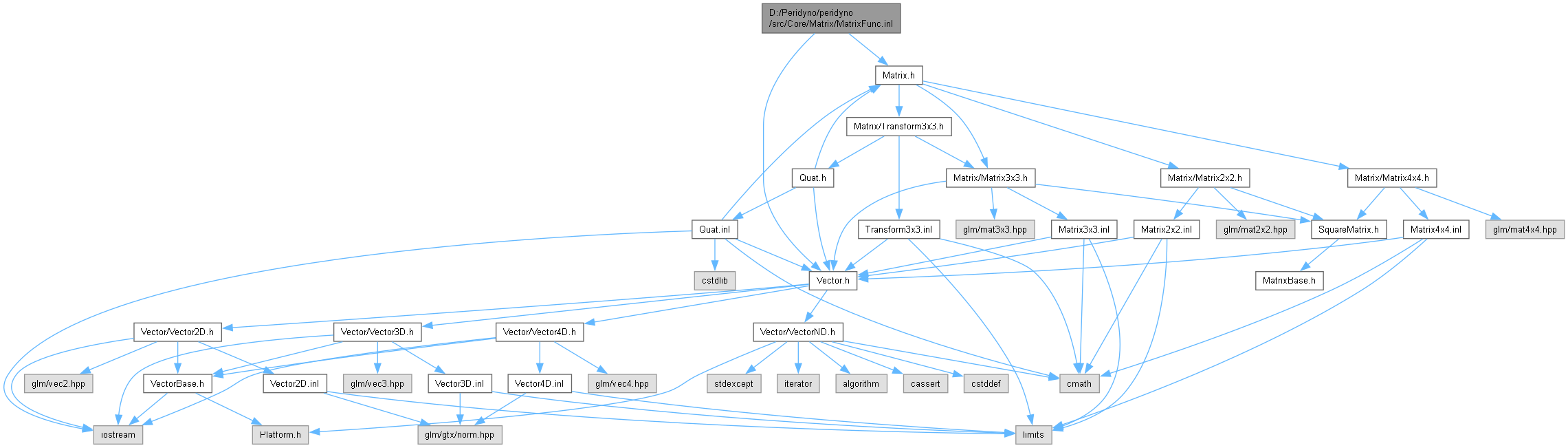
Go to the source code of this file.
Namespaces | |
| namespace | dyno |
| This is an implementation of AdditiveCCD based on peridyno. | |
Functions | |
| template<typename Real> | |
| DYN_FUNC void | dyno::jacobiRotate (SquareMatrix< Real, 3 > &A, SquareMatrix< Real, 3 > &R, int p, int q) |
| template<typename Real> | |
| DYN_FUNC void | dyno::EigenDecomposition (const SquareMatrix< Real, 3 > &A, SquareMatrix< Real, 3 > &eigenVecs, Vector< Real, 3 > &eigenVals) |
| template<typename Real> | |
| DYN_FUNC void | dyno::QRDecomposition (SquareMatrix< Real, 3 > &A, SquareMatrix< Real, 3 > &R, int p, int q) |
| template<typename Real> | |
| DYN_FUNC void | dyno::polarDecomposition (const SquareMatrix< Real, 3 > &A, SquareMatrix< Real, 3 > &R, SquareMatrix< Real, 3 > &U, SquareMatrix< Real, 3 > &D) |
| template<typename Real> | |
| DYN_FUNC void | dyno::polarDecomposition (const SquareMatrix< Real, 3 > &M, SquareMatrix< Real, 3 > &R, Real tolerance) |