 |
PeriDyno 1.2.1
|
Loading...
Searching...
No Matches
|
PeriDyno 1.2.1
|
#include "Array/Array.h"#include "Topology/TriangleSet.h"#include "Matrix.h"#include "Vector.h"#include "Primitive/Primitive3D.h"#include "Topology/TextureMesh.h"#include "tinygltf/tiny_gltf.h"#include "Field/FilePath.h"#include "Topology/SkinInfo.h"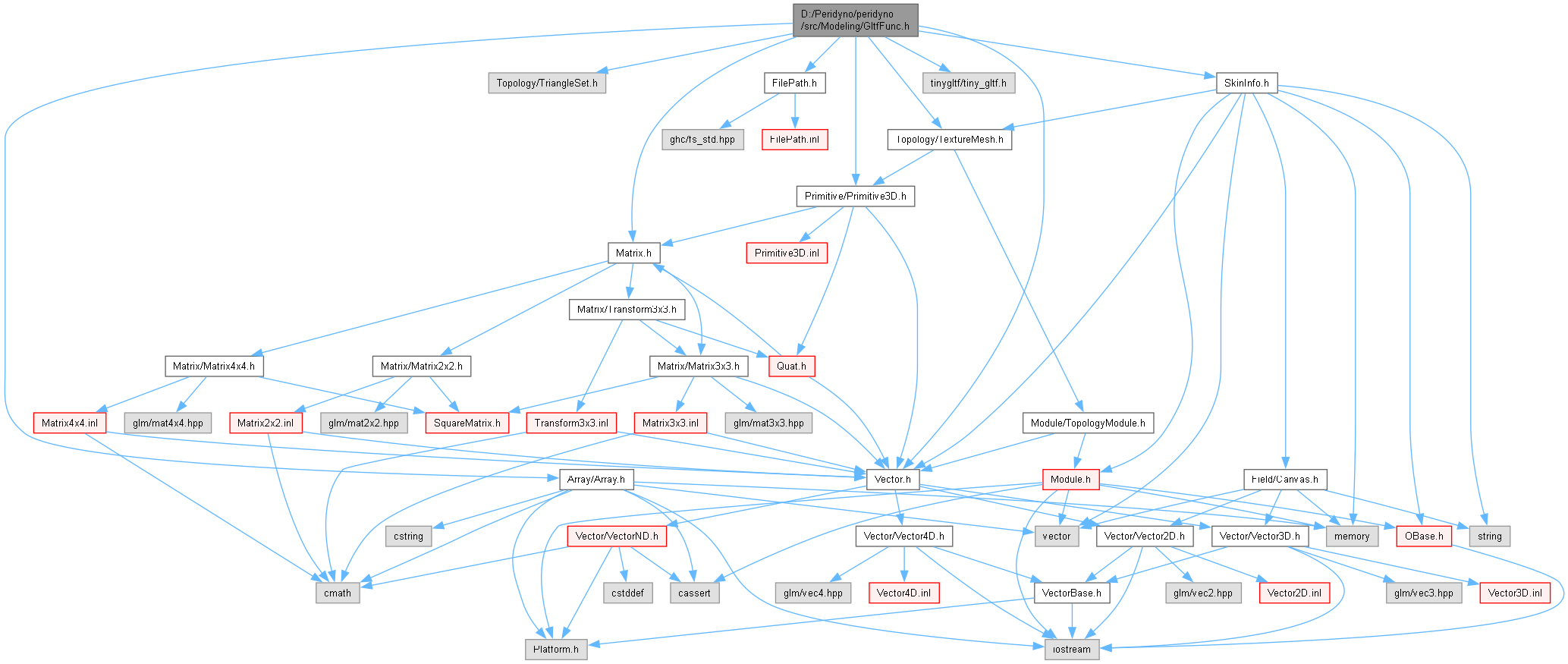
Go to the source code of this file.
Namespaces | |
| namespace | dyno |
| This is an implementation of AdditiveCCD based on peridyno. | |
Macros | |
| #define | NULL_TIME (-9599.99) |
Typedefs | |
| typedef unsigned char | dyno::byte |
| typedef int | dyno::joint |
| typedef int | dyno::scene |
Functions | |
| void | dyno::getBoundingBoxByName (tinygltf::Model &model, const tinygltf::Primitive &primitive, const std::string &attributeName, TAlignedBox3D< Real > &bound, Transform3f &transform) |
| void | dyno::getVec3fByAttributeName (tinygltf::Model &model, const tinygltf::Primitive &primitive, const std::string &attributeName, std::vector< Vec3f > &vertices) |
| void | dyno::getVec4ByAttributeName (tinygltf::Model &model, const tinygltf::Primitive &primitive, const std::string &attributeName, std::vector< Vec4f > &vec4Data) |
| void | dyno::getRealByIndex (tinygltf::Model &model, int index, std::vector< Real > &result) |
| void | dyno::getVec3fByIndex (tinygltf::Model &model, int index, std::vector< Vec3f > &result) |
| void | dyno::getQuatByIndex (tinygltf::Model &model, int index, std::vector< Quat< float > > &result) |
| void | dyno::getTriangles (tinygltf::Model &model, const tinygltf::Primitive &primitive, std::vector< TopologyModule::Triangle > &triangles, int pointOffest) |
| std::string | dyno::getTexUri (const std::vector< tinygltf::Texture > &textures, const std::vector< tinygltf::Image > &images, int index) |
| void | dyno::getVertexBindJoint (tinygltf::Model &model, const tinygltf::Primitive &primitive, const std::string &attributeName, std::vector< Vec4f > &vec4Data, const std::vector< int > &skinJoints) |
| void | dyno::getNodesAndHierarchy (tinygltf::Model &model, std::map< scene, std::vector< int > > Scene_JointsNodesId, std::vector< joint > &all_Nodes, std::map< joint, std::vector< int > > &id_Dir) |
| void | dyno::traverseNode (tinygltf::Model &model, joint id, std::vector< joint > &joint_nodes, std::map< joint, std::vector< int > > &dir, std::vector< joint > currentDir) |
| void | dyno::getJointsTransformData (const std::vector< int > &all_Joints, std::vector< std::vector< int > > &joint_child, std::map< int, Quat< float > > &joint_rotation, std::map< int, Vec3f > &joint_scale, std::map< int, Vec3f > &joint_translation, std::map< int, Mat4f > &joint_matrix, tinygltf::Model model) |
| void | dyno::importAnimation (tinygltf::Model model, std::map< joint, Vec3i > &joint_output, std::map< joint, Vec3f > &joint_input, std::map< joint, std::vector< Vec3f > > &joint_T_f_anim, std::map< joint, std::vector< Real > > &joint_T_Time, std::map< joint, std::vector< Vec3f > > &joint_S_f_anim, std::map< joint, std::vector< Real > > &joint_S_Time, std::map< joint, std::vector< Quat< float > > > &joint_R_f_anim, std::map< joint, std::vector< Real > > &joint_R_Time) |
| void | dyno::buildInverseBindMatrices (const std::vector< joint > &all_Joints, std::map< joint, Mat4f > &joint_matrix, int &maxJointId, tinygltf::Model &model, std::map< joint, Quat< float > > &joint_rotation, std::map< joint, Vec3f > &joint_translation, std::map< joint, Vec3f > &joint_scale, std::map< joint, Mat4f > &joint_inverseBindMatrix, std::map< joint, std::vector< int > > jointId_joint_Dir) |
| void | dyno::updateJoint_Mesh_Camera_Dir (tinygltf::Model &model, int &jointNum, int &meshNum, std::map< joint, std::vector< int > > &jointId_joint_Dir, std::vector< joint > &all_Joints, std::vector< int > &all_Nodes, std::map< joint, std::vector< int > > nodeId_Dir, std::map< int, std::vector< int > > &meshId_Dir, std::vector< int > &all_Meshs, int &maxJointId) |
| void | dyno::getMeshMatrix (tinygltf::Model &model, const std::vector< int > &all_MeshNodeIDs, int &maxMeshId, CArray< Mat4f > &mesh_Matrix) |
| template<typename Vec3f, typename Vec4f, typename Mat4f, typename Vec2u> | |
| void | dyno::skinAnimation (DArray< Vec3f > &intialPosition, DArray< Vec3f > &worldPosition, DArray< Mat4f > &joint_inverseBindMatrix, DArray< Mat4f > &WorldMatrix, DArray< Vec4f > &bind_joints_0, DArray< Vec4f > &bind_joints_1, DArray< Vec4f > &weights_0, DArray< Vec4f > &weights_1, Mat4f transform, bool isNormal, Vec2u range) |
| void | dyno::loadGLTFTextureMesh (std::shared_ptr< TextureMesh > texMesh, const std::string &filepath) |
| void | dyno::loadGLTFMaterial (tinygltf::Model &model, std::shared_ptr< TextureMesh > texMesh, FilePath filename) |
| void | dyno::loadGLTFShape (tinygltf::Model &model, std::shared_ptr< TextureMesh > texMesh, const std::string &filepath, DArray< Vec3f > *initialPosition=nullptr, DArray< Vec3f > *initialNormal=nullptr, DArray< Mat4f > *d_mesh_Matrix=nullptr, DArray< int > *d_shape_meshId=nullptr, std::shared_ptr< SkinInfo > skinData=nullptr) |
| template<typename Triangle> | |
| void | dyno::updateVertexIdShape (DArray< Triangle > &triangle, DArray< uint > &ID_shapeId, int &shapeId, int size) |
| template<typename Mat4f, typename Vec3f> | |
| void | dyno::shapeTransform (DArray< Vec3f > &intialPosition, DArray< Vec3f > &worldPosition, DArray< Vec3f > &intialNormal, DArray< Vec3f > &Normal, DArray< Mat4f > &WorldMatrix, DArray< uint > &vertexId_shape, DArray< int > &shapeId_MeshId) |
| template<typename Vec3f> | |
| void | dyno::setupPoints (DArray< Vec3f > &newPos, DArray< Vec3f > &pos, DArray< int > &radix) |
| template<typename uint> | |
| void | dyno::Shape_PointCounter (DArray< int > &counter, DArray< uint > &point_ShapeIds, uint &target) |
| template<typename Vec3f, typename uint> | |
| void | dyno::shapeToCenter (DArray< Vec3f > &iniPos, DArray< Vec3f > &finalPos, DArray< uint > &shapeId, DArray< Vec3f > &t) |
| #define NULL_TIME (-9599.99) |
Definition at line 13 of file GltfFunc.h.