|
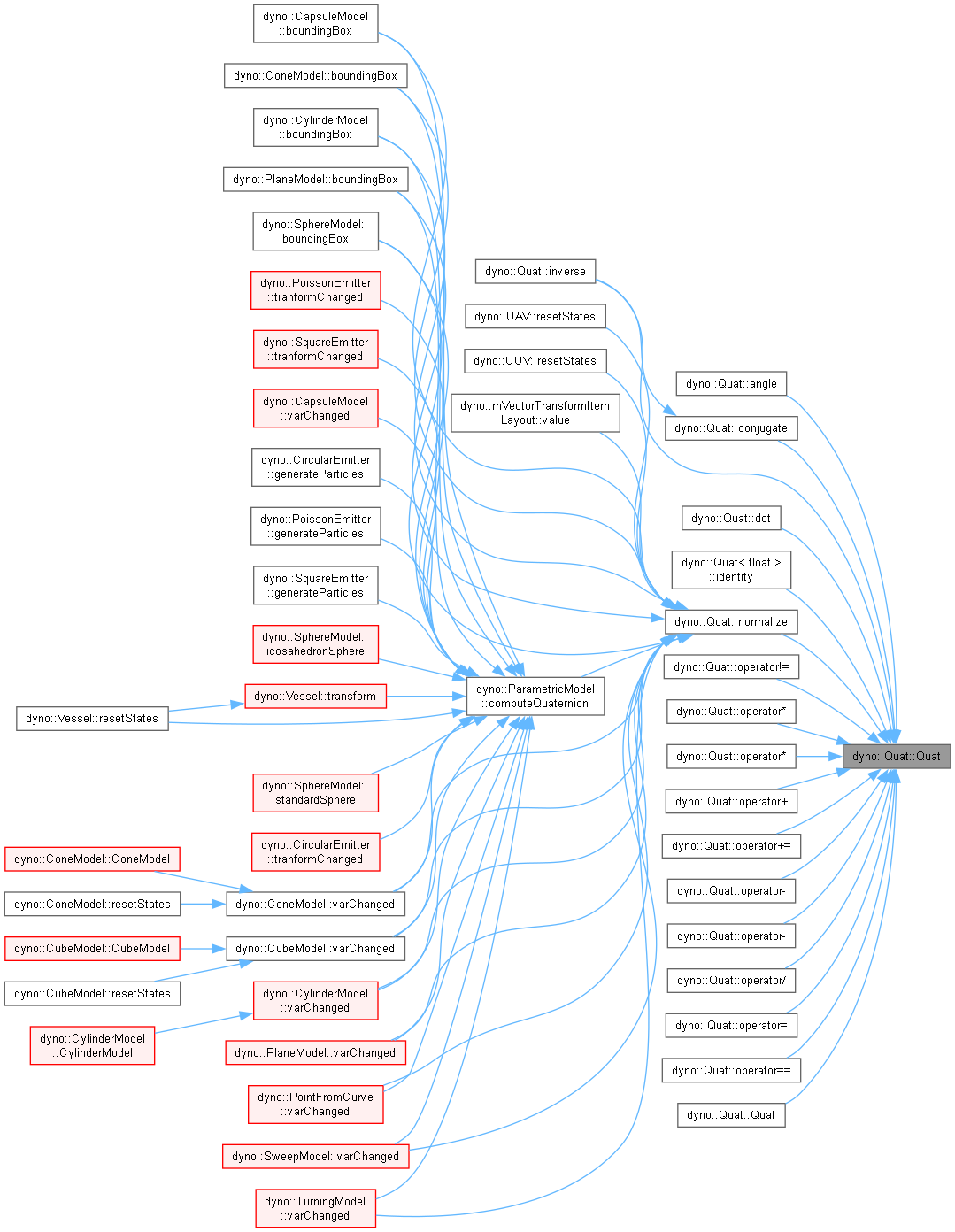
| DYN_FUNC | Quat () |
| |
| DYN_FUNC | Quat (Real x, Real y, Real z, Real w) |
| | Construct a quaternion, be aware that w is the scalar part and (x, y, z) is the vector part.
|
| |
| DYN_FUNC | Quat (Real rot, const Vector< Real, 3 > &axis) |
| | Construct a quaternion from a rotation and a unit vector.
|
| |
| DYN_FUNC | Quat (const Vector< Real, 3 > u0, const Vector< Real, 3 > u1) |
| |
| DYN_FUNC | Quat (const Quat< Real > &) |
| |
| DYN_FUNC | Quat (const SquareMatrix< Real, 3 > &) |
| |
| DYN_FUNC | Quat (const SquareMatrix< Real, 4 > &) |
| |
| DYN_FUNC | Quat (const Real yaw, const Real pitch, const Real roll) |
| |
| DYN_FUNC Quat< Real > & | operator= (const Quat< Real > &) |
| |
| DYN_FUNC Quat< Real > & | operator+= (const Quat< Real > &) |
| |
| DYN_FUNC Quat< Real > & | operator-= (const Quat< Real > &) |
| |
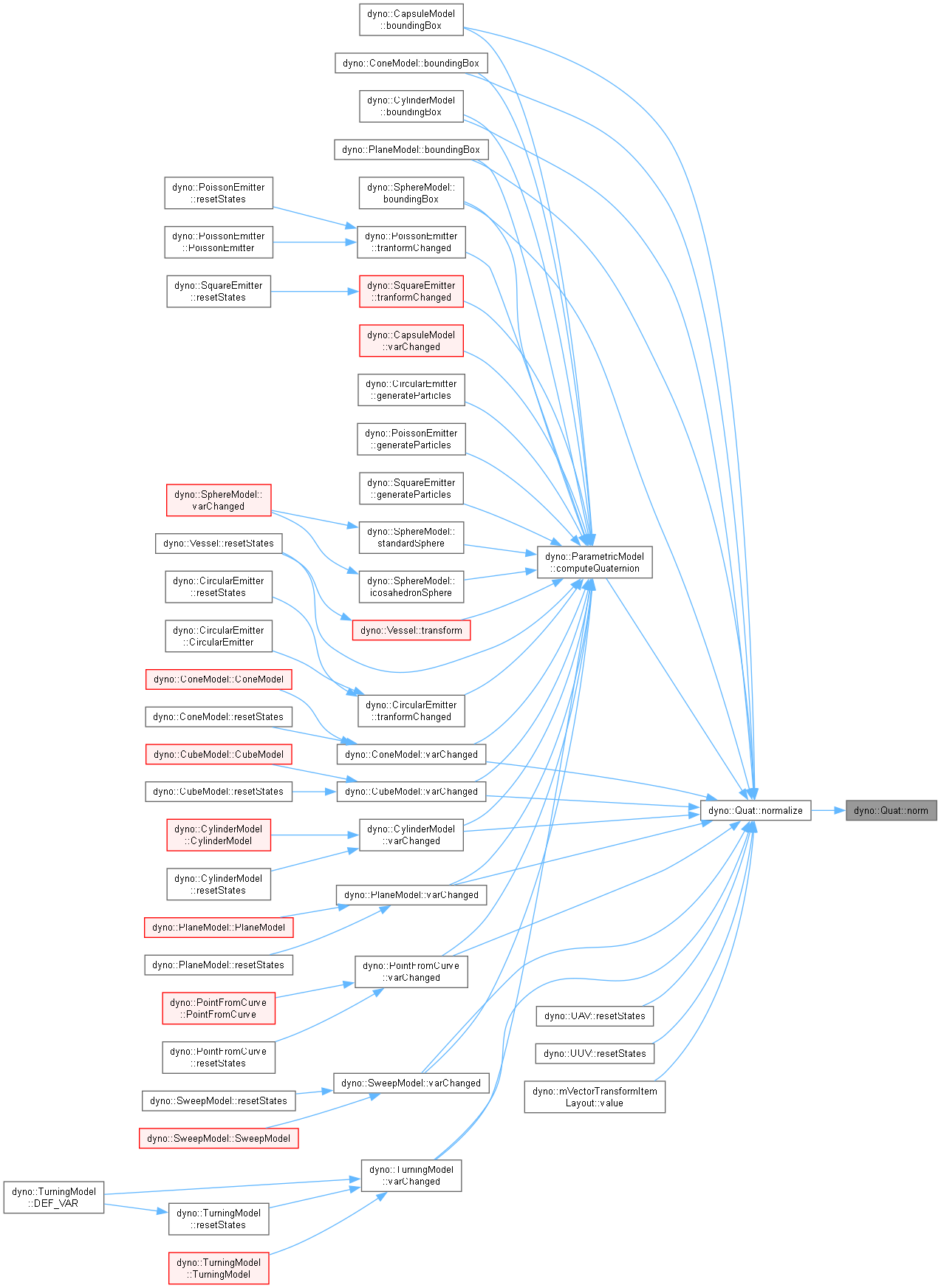
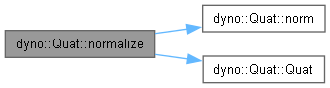
| DYN_FUNC Real | norm () const |
| |
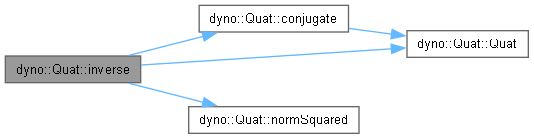
| DYN_FUNC Real | normSquared () const |
| |
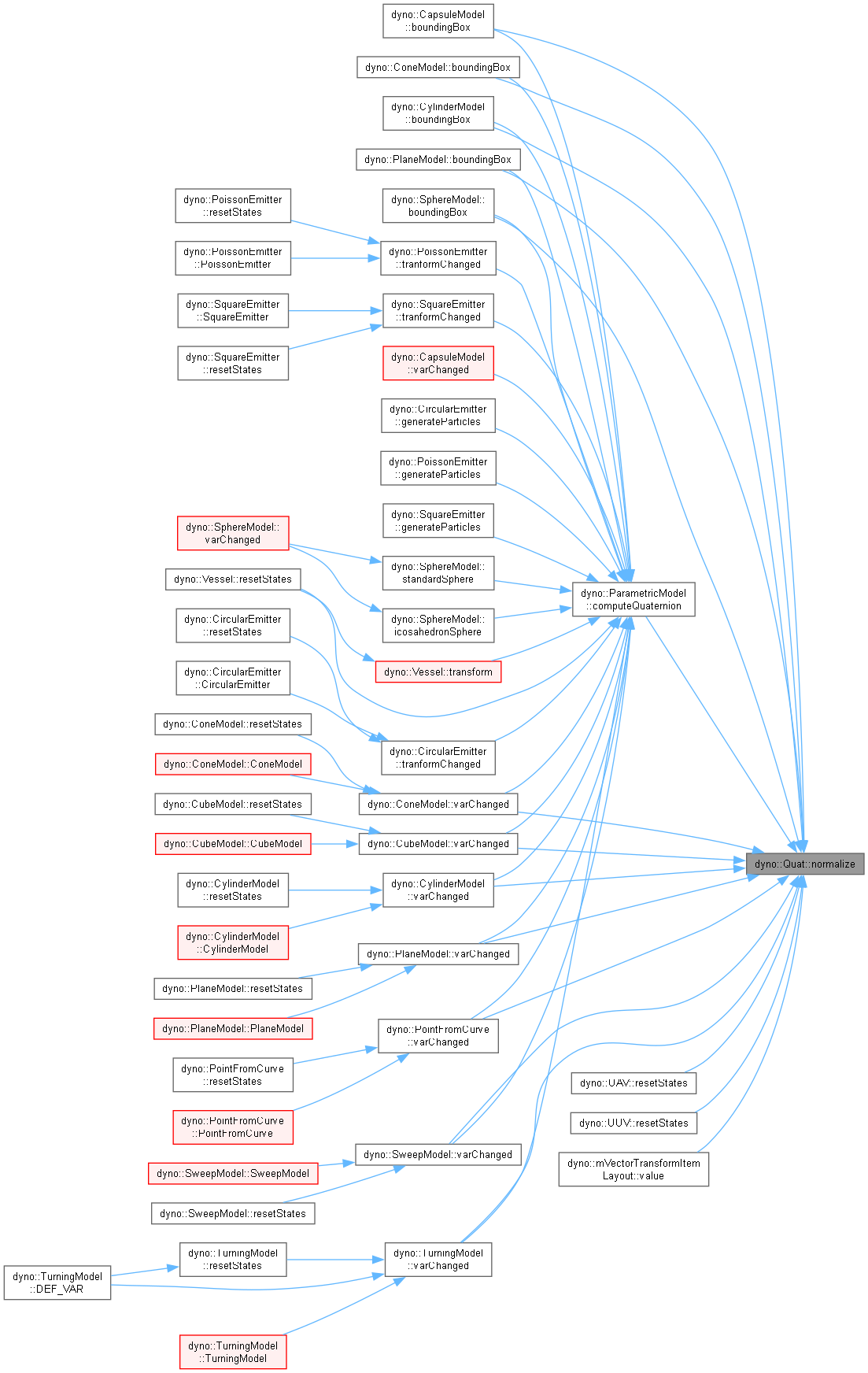
| DYN_FUNC Quat< Real > & | normalize () |
| |
| DYN_FUNC Quat< Real > | inverse () const |
| |
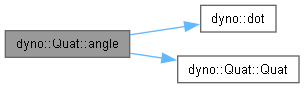
| DYN_FUNC Real | angle () const |
| |
| DYN_FUNC Real | angle (const Quat< Real > &) const |
| |
| DYN_FUNC Quat< Real > | conjugate () const |
| |
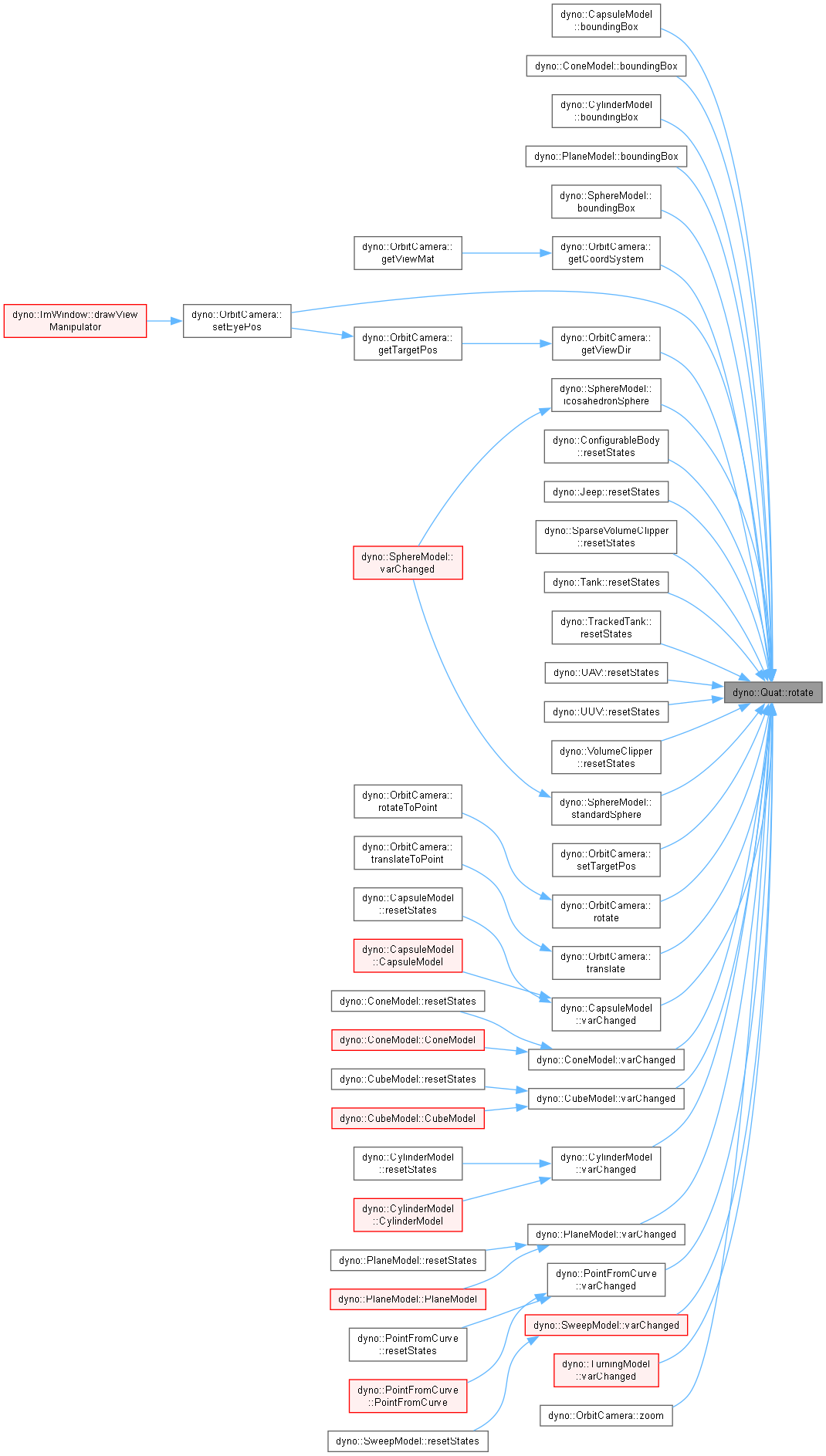
| DYN_FUNC Vector< Real, 3 > | rotate (const Vector< Real, 3 > &v) const |
| | Rotate a vector by the quaternion, guarantee the quaternion is normalized before rotating the vector.
|
| |
| DYN_FUNC void | toRotationAxis (Real &rot, Vector< Real, 3 > &axis) const |
| |
| DYN_FUNC void | toEulerAngle (Real &yaw, Real &pitch, Real &roll) const |
| |
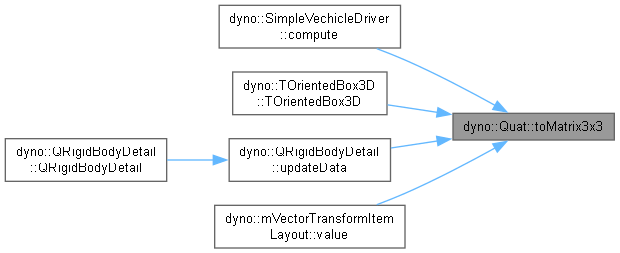
| DYN_FUNC SquareMatrix< Real, 3 > | toMatrix3x3 () const |
| |
| DYN_FUNC SquareMatrix< Real, 4 > | toMatrix4x4 () const |
| |
| DYN_FUNC Quat< Real > | operator- (const Quat< Real > &) const |
| |
| DYN_FUNC Quat< Real > | operator- (void) const |
| |
| DYN_FUNC Quat< Real > | operator+ (const Quat< Real > &) const |
| |
| DYN_FUNC Quat< Real > | operator* (const Quat< Real > &) const |
| |
| DYN_FUNC Quat< Real > | operator* (const Real &) const |
| |
| DYN_FUNC Quat< Real > | operator/ (const Real &) const |
| |
| DYN_FUNC bool | operator== (const Quat< Real > &) const |
| |
| DYN_FUNC bool | operator!= (const Quat< Real > &) const |
| |
| DYN_FUNC Real | dot (const Quat< Real > &) const |
| |
template<typename
Real>
class dyno::Quat< Real >
Definition at line 31 of file Quat.h.