|
PeriDyno 1.2.1
|
Loading...
Searching...
No Matches
|
PeriDyno 1.2.1
|
#include <TightCCD.h>
Static Public Member Functions | |
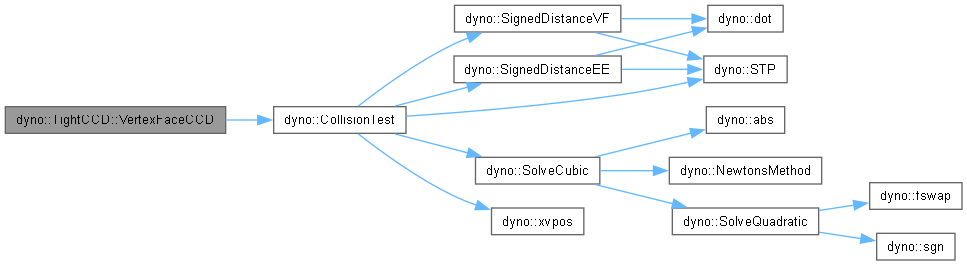
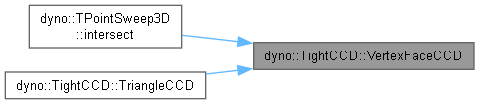
| static DYN_FUNC bool | VertexFaceCCD (const Vector< T, 3 > &p0, const Vector< T, 3 > &a0, const Vector< T, 3 > &b0, const Vector< T, 3 > &c0, const Vector< T, 3 > &p1, const Vector< T, 3 > &a1, const Vector< T, 3 > &b1, const Vector< T, 3 > &c1, T &time) |
| Do a continuous collision detection between a vertex and a triangle. | |
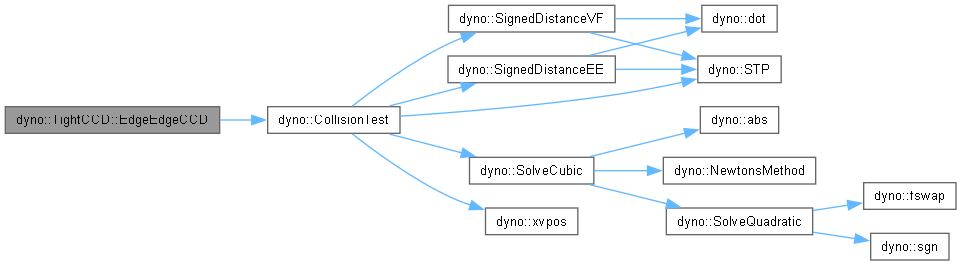
| static DYN_FUNC bool | EdgeEdgeCCD (const Vector< T, 3 > &a0, const Vector< T, 3 > &b0, const Vector< T, 3 > &c0, const Vector< T, 3 > &d0, const Vector< T, 3 > &a1, const Vector< T, 3 > &b1, const Vector< T, 3 > &c1, const Vector< T, 3 > &d1, T &time) |
| Do a continuous collision detection between two edges. | |
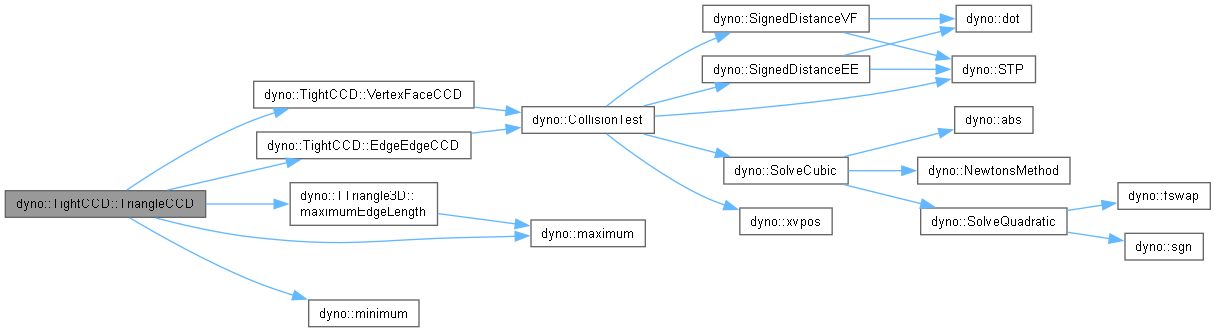
| static DYN_FUNC bool | TriangleCCD (TTriangle3D< Real > &s0, TTriangle3D< Real > &s1, TTriangle3D< Real > &t0, TTriangle3D< Real > &t1, Real &toi) |
| Do a continuous collision detection between two triangles. | |
Definition at line 33 of file TightCCD.h.
|
inlinestatic |
Do a continuous collision detection between two edges.
| T |
| [a0,b0] | first edge at t0 |
| [a1,b1] | first edge at t1 |
| [c0,d0] | second edge at t0 |
| [a1,b1] | second edge at t1 |
| time | time of impact, initialize its value to 1 if EdgeEdgeCCD was for the first time called |
Definition at line 241 of file TightCCD.inl.

|
inlinestatic |
Do a continuous collision detection between two triangles.
| T |
| s0 | first triangle at t0 |
| s1 | first triangle at t1 |
| t0 | second triangle at t0 |
| t1 | second triangle at t1 |
| time | time of impact, initialize its value to 1 if TriangleCCD was for the first time called |
Definition at line 259 of file TightCCD.inl.
|
inlinestatic |
Do a continuous collision detection between a vertex and a triangle.
| p0 | The vertex position at t0 |
| p1 | The vertex position at t1 |
| [a0,b0,c0] | The triangle at t0 |
| [a1,b1,c1] | The triangle at t1 |
| time | the time of impact, initialize its value to 1 if VertexFaceCCD was for the first time called |
Definition at line 223 of file TightCCD.inl.