 |
PeriDyno 1.2.1
|
Loading...
Searching...
No Matches
|
PeriDyno 1.2.1
|
#include "Platform.h"#include "Primitive/Primitive3D.h"#include "Vector/Vector3D.h"#include "ComputeGeometry.h"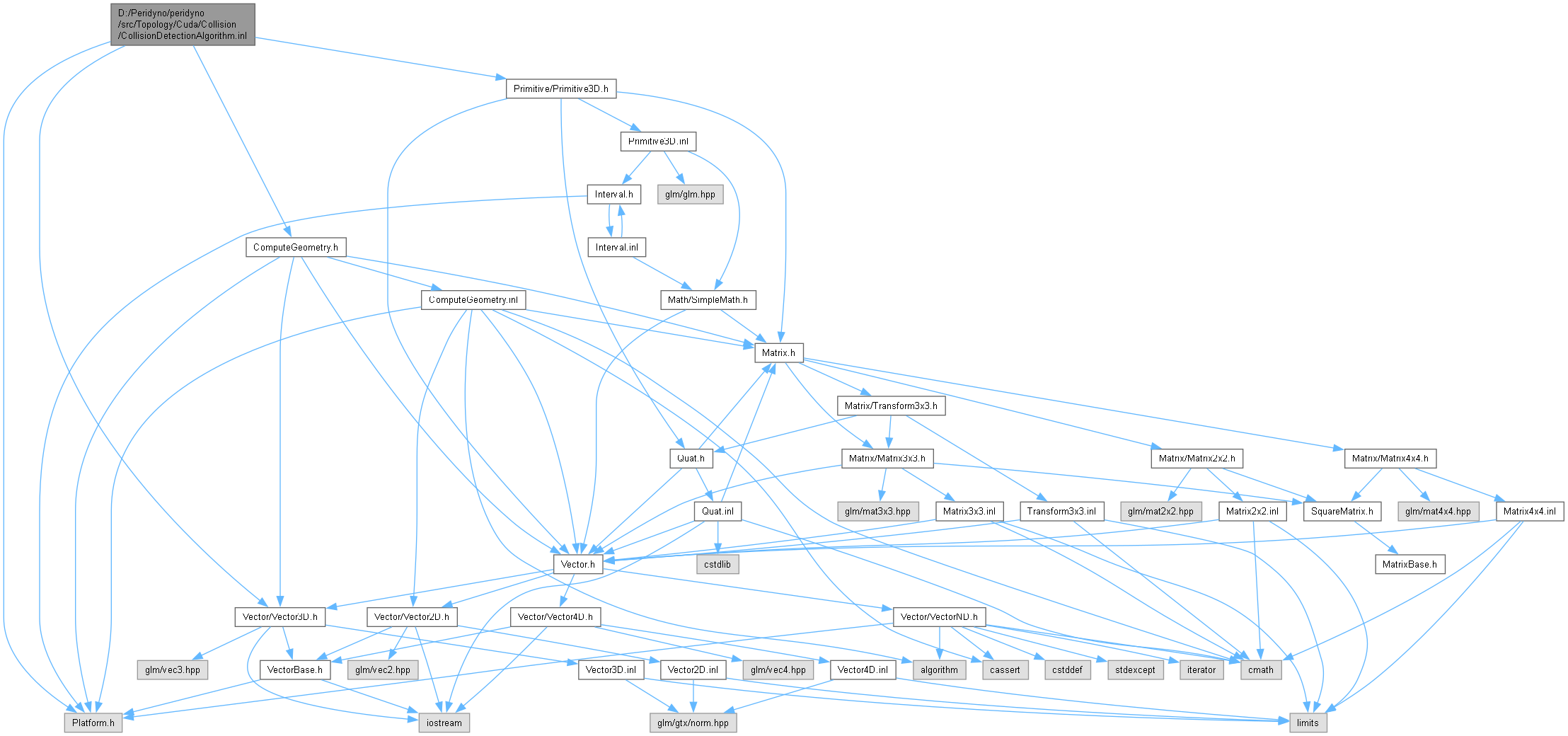
Go to the source code of this file.
Classes | |
| struct | dyno::ClipVertex |
Namespaces | |
| namespace | dyno |
| This is an implementation of AdditiveCCD based on peridyno. | |
Macros | |
| #define | REAL_infinity 1.0e30 |
| #define | REAL_EQUAL(a, b) |
| #define | REAL_GREAT(a, b) |
| #define | REAL_LESS(a, b) |
| #define | InFront(a) |
| #define | Behind(a) |
| #define | On(a) |
Functions | |
| template<typename Real> | |
| DYN_FUNC float | dyno::fsign (Real v) |
| template<typename Real> | |
| DYN_FUNC void | dyno::swapContactPair (TManifold< Real > &m) |
| template<typename Real> | |
| DYN_FUNC bool | dyno::trackFaceAxis (int &axis, Real &sMax, Vector< Real, 3 > &axisNormal, int n, Real s, const Vector< Real, 3 > &normal) |
| template<typename Real> | |
| DYN_FUNC bool | dyno::trackEdgeAxis (int &axis, Real &sMax, Vector< Real, 3 > &axisNormal, int n, Real s, const Vector< Real, 3 > &normal) |
| template<typename Real> | |
| DYN_FUNC void | dyno::computeReferenceEdgesAndBasis (unsigned char *out, SquareMatrix< Real, 3 > *basis, Vector< Real, 3 > *e, const Vector< Real, 3 > &eR, const Transform< Real, 3 > &rtx, Vector< Real, 3 > n, int axis) |
| template<typename Real> | |
| DYN_FUNC void | dyno::computeIncidentFace (ClipVertex *out, const Transform< Real, 3 > &itx, const Vector< Real, 3 > &e, Vector< Real, 3 > n) |
| template<typename Real> | |
| DYN_FUNC int | dyno::orthographic (ClipVertex *out, Real sign, Real e, int axis, int clipEdge, ClipVertex *in, int inCount) |
| template<typename Real> | |
| DYN_FUNC int | dyno::clip (ClipVertex *outVerts, float *outDepths, const Vector< Real, 3 > &rPos, const Vector< Real, 3 > &e, unsigned char *clipEdges, const SquareMatrix< Real, 3 > &basis, ClipVertex *incident) |
| template<typename Real> | |
| DYN_FUNC int | dyno::clipEdgeAgainstRectangle (ClipVertex *outVerts, float *outDepths, const Vector< Real, 3 > &rPos, const Vector< Real, 3 > &e, unsigned char *clipEdges, const SquareMatrix< Real, 3 > &basis, ClipVertex *incident) |
| template<typename Real> | |
| DYN_FUNC void | dyno::edgesContact (Vector< Real, 3 > &CA, Vector< Real, 3 > &CB, const Vector< Real, 3 > &PA, const Vector< Real, 3 > &QA, const Vector< Real, 3 > &PB, const Vector< Real, 3 > &QB) |
| template<typename Real> | |
| DYN_FUNC void | dyno::checkSignedDistance (Real lowerBoundaryA, Real upperBoundaryA, Real lowerBoundaryB, Real upperBoundaryB, Real &intersectionDistance, Real &boundaryA, Real &boundaryB) |
| template<typename Real> | |
| DYN_FUNC bool | dyno::checkPointInBoundary (const Vec3f &p, const Vec3f &N, const Real &b, const Real &r) |
| template<typename Real> | |
| DYN_FUNC void | dyno::updateSDF (Real &boundaryA, Real &boundaryB, Real &depth, Vec3f &normal, Real currentBoundaryA, Real currentBoundaryB, Real currentDepth, Vec3f currentN) |
| template<typename Real, typename ShapeA, typename ShapeB> | |
| DYN_FUNC void | dyno::checkSignedDistanceAxis (Real &intersectionDistance, Real &BoundaryA, Real &BoundaryB, const Vec3f axisNormal, ShapeA &shapeA, ShapeB &shapeB, const Real radiusA, const Real radiusB) |
| template<typename Real, typename ShapeA, typename ShapeB> | |
| DYN_FUNC void | dyno::checkAxisPoint (TSeparationData< Real > &sat, ShapeA &shapeA, ShapeB &shapeB, const Real radiusA, const Real radiusB, Vec3f pA, Vec3f pB, const Real rA=0.f, const Real rB=0.f) |
| template<typename Real, typename ShapeA, typename ShapeB> | |
| DYN_FUNC void | dyno::checkAxisEdge (TSeparationData< Real > &sat, ShapeA &shapeA, ShapeB &shapeB, const Real radiusA, const Real radiusB, Segment3D edgeA, Segment3D edgeB) |
| template<typename Real, typename ShapeA, typename ShapeB> | |
| DYN_FUNC void | dyno::checkAxisTri (TSeparationData< Real > &sat, ShapeA &shapeA, ShapeB &shapeB, const Real radiusA, const Real radiusB, Triangle3D tri, SeparationType type) |
| template<typename Real, typename ShapeA, typename ShapeB> | |
| DYN_FUNC void | dyno::checkAxisRect (TSeparationData< Real > &sat, ShapeA &shapeA, ShapeB &shapeB, const Real radiusA, const Real radiusB, Rectangle3D rect, SeparationType type) |
| template<typename Real> | |
| DYN_FUNC void | dyno::projectOnAxis (Real &lowerBoundary, Real &upperBoundary, const Vec3f axisNormal, Sphere3D sphere, const Real radius) |
| template<typename Real> | |
| DYN_FUNC void | dyno::setupContactOnSphere (TManifold< Real > &m, TSeparationData< Real > &sat, const TSphere3D< Real > &sphereB, const Real radiusA, const Real radiusB) |
| template<typename Real> | |
| DYN_FUNC int | dyno::ClippingWithTri (Vector< Real, 3 > *q, const TTriangle3D< Real > &triA, const TSphere3D< Real > &sphereB, const Vector< Real, 3 > &transA, const Vector< Real, 3 > &transB) |
| template<typename Real> | |
| DYN_FUNC int | dyno::ClippingWithRect (Vector< Real, 3 > *q, const TRectangle3D< Real > &rectA, const TSphere3D< Real > &sphereB, const Vector< Real, 3 > &transA, const Vector< Real, 3 > &transB) |
| template<typename Real> | |
| DYN_FUNC void | dyno::projectOnAxis (Real &lowerBoundary, Real &upperBoundary, const Vec3f axisNormal, Segment3D seg, const Real radius) |
| template<typename Real> | |
| DYN_FUNC int | dyno::ClippingWithTri (Vector< Real, 3 > *q, const TTriangle3D< Real > &triA, const TSegment3D< Real > &segB, const Vector< Real, 3 > &transA, const Vector< Real, 3 > &transB) |
| template<typename Real> | |
| DYN_FUNC int | dyno::ClippingWithRect (Vector< Real, 3 > *q, const TRectangle3D< Real > &rectA, const TSegment3D< Real > &segB, const Vector< Real, 3 > &transA, const Vector< Real, 3 > &transB) |
| template<typename Real> | |
| DYN_FUNC void | dyno::setupContactOnSeg (TManifold< Real > &m, TSeparationData< Real > &sat, const TSegment3D< Real > &segB, const Real radiusA, const Real radiusB) |
| template<typename Real> | |
| DYN_FUNC void | dyno::projectOnAxis (Real &lowerBoundary, Real &upperBoundary, const Vec3f axisNormal, Triangle3D tri, const Real radius) |
| template<typename Real> | |
| DYN_FUNC int | dyno::ClippingWithTri (Vector< Real, 3 > *q, const TTriangle3D< Real > &triA, const TTriangle3D< Real > &triB, const Vector< Real, 3 > &transA, const Vector< Real, 3 > &transB) |
| template<typename Real> | |
| DYN_FUNC int | dyno::ClippingWithRect (Vector< Real, 3 > *q, const TRectangle3D< Real > &rectA, const TTriangle3D< Real > &triB, const Vector< Real, 3 > &transA, const Vector< Real, 3 > &transB) |
| template<typename Real, typename Shape> | |
| DYN_FUNC void | dyno::setupContactOnTri (TManifold< Real > &m, TSeparationData< Real > &sat, const Shape &shapeA, const TTriangle3D< Real > &triB, const Real radiusA, const Real radiusB) |
| template<typename Real> | |
| DYN_FUNC void | dyno::projectOnAxis (Real &lowerBoundary, Real &upperBoundary, const Vec3f axisNormal, Tet3D tet, const Real radius) |
| template<typename Real> | |
| DYN_FUNC int | dyno::ClippingWithTri (Vector< Real, 3 > *q, const TTriangle3D< Real > &triA, const TTet3D< Real > &tetB, const Vector< Real, 3 > &transA, const Vector< Real, 3 > &transB) |
| template<typename Real> | |
| DYN_FUNC int | dyno::ClippingWithRect (Vector< Real, 3 > *q, const TRectangle3D< Real > &rectA, const TTet3D< Real > &tetB, const Vector< Real, 3 > &transA, const Vector< Real, 3 > &transB) |
| template<typename Real, typename Shape> | |
| DYN_FUNC void | dyno::setupContactOnTet (TManifold< Real > &m, TSeparationData< Real > &sat, const Shape &shapeA, const TTet3D< Real > &tetB, const Real radiusA, const Real radiusB) |
| template<typename Real> | |
| DYN_FUNC void | dyno::projectOnAxis (Real &lowerBoundary, Real &upperBoundary, const Vec3f axisNormal, OrientedBox3D box, const Real radius) |
| template<typename Real> | |
| DYN_FUNC int | dyno::ClippingWithTri (Vector< Real, 3 > *q, const TTriangle3D< Real > &triA, const TOrientedBox3D< Real > &boxB, const Vector< Real, 3 > &transA, const Vector< Real, 3 > &transB) |
| template<typename Real> | |
| DYN_FUNC int | dyno::ClippingWithRect (Vector< Real, 3 > *q, const TRectangle3D< Real > &rectA, const TOrientedBox3D< Real > &boxB, const Vector< Real, 3 > &transA, const Vector< Real, 3 > &transB) |
| template<typename Real, typename Shape> | |
| DYN_FUNC void | dyno::setupContactOnBox (TManifold< Real > &m, TSeparationData< Real > &sat, const Shape &shapeA, const TOrientedBox3D< Real > &boxB, const Real radiusA, const Real radiusB) |
| template<typename Real> | |
| DYN_FUNC void | dyno::computeSupportEdge (Vector< Real, 3 > &aOut, Vector< Real, 3 > &bOut, const SquareMatrix< Real, 3 > &rot, const Vector< Real, 3 > &trans, const Vector< Real, 3 > &e, Vector< Real, 3 > n) |
| template<typename Real> | |
| DYN_FUNC bool | dyno::checkOverlapAxis (Real &lowerBoundary1, Real &upperBoundary1, Real &lowerBoundary2, Real &upperBoundary2, Real &intersectionDistance, Real &boundary1, Real &boundary2, const Vector< Real, 3 > axisNormal, OrientedBox3D box, Capsule3D cap) |
| template<typename Real> | |
| DYN_FUNC bool | dyno::checkOverlapTetTri (Real lowerBoundary1, Real upperBoundary1, Real lowerBoundary2, Real upperBoundary2, Real &intersectionDistance, Real &boundary1, Real &boundary2) |
| template<typename Real> | |
| DYN_FUNC bool | dyno::checkOverlapAxis (Real &lowerBoundary1, Real &upperBoundary1, Real &lowerBoundary2, Real &upperBoundary2, Real &intersectionDistance, Real &boundary1, Real &boundary2, const Vector< Real, 3 > axisNormal, Tet3D tet, Capsule3D cap) |
| template<typename Real> | |
| DYN_FUNC void | dyno::setupContactCaps (Real boundary1, Real boundary2, const Vector< Real, 3 > axisNormal, TCapsule3D< Real > cap, TOrientedBox3D< Real > box, Real depth, TManifold< Real > &m) |
| template<typename Real> | |
| DYN_FUNC void | dyno::setupContactTets (Real boundary1, Real boundary2, const Vector< Real, 3 > axisNormal, Tet3D tet, Capsule3D cap, Real sMax, TManifold< Real > &m) |
| template<typename Real> | |
| DYN_FUNC void | dyno::setupContactTetTri (Real boundary1, Real boundary2, const Vector< Real, 3 > axisNormal, Tet3D tet, Triangle3D triangle, Real sMax, TManifold< Real > &m) |
| template<typename Real> | |
| DYN_FUNC bool | dyno::checkOverlap (Real lowerBoundary1, Real upperBoundary1, Real lowerBoundary2, Real upperBoundary2, Real &intersectionDistance, Real &boundary1, Real &boundary2) |
| template<typename Real> | |
| DYN_FUNC bool | dyno::checkOverlapAxis (Real &lowerBoundary1, Real &upperBoundary1, Real &lowerBoundary2, Real &upperBoundary2, Real &intersectionDistance, Real &boundary1, Real &boundary2, const Vector< Real, 3 > axisNormal, Tet3D tet1, Tet3D tet2) |
| template<typename Real> | |
| DYN_FUNC bool | dyno::checkOverlapAxis (Real &lowerBoundary1, Real &upperBoundary1, Real &lowerBoundary2, Real &upperBoundary2, Real &intersectionDistance, Real &boundary1, Real &boundary2, const Vector< Real, 3 > axisNormal, Tet3D tet, Triangle3D tri) |
| template<typename Real> | |
| DYN_FUNC bool | dyno::checkOverlapAxis (Real &lowerBoundary1, Real &upperBoundary1, Real &lowerBoundary2, Real &upperBoundary2, Real &intersectionDistance, Real &boundary1, Real &boundary2, const Vector< Real, 3 > axisNormal, Tet3D tet, OrientedBox3D box) |
| template<typename Real> | |
| DYN_FUNC void | dyno::setupContactTets (Real boundary1, Real boundary2, const Vector< Real, 3 > axisNormal, Tet3D tet1, Tet3D tet2, Real sMax, TManifold< Real > &m) |
| template<typename Real> | |
| DYN_FUNC void | dyno::setupContactTets (Real boundary1, Real boundary2, const Vector< Real, 3 > axisNormal, Tet3D tet, TOrientedBox3D< Real > box, Real sMax, TManifold< Real > &m) |
| #define Behind | ( | a | ) |
Definition at line 264 of file CollisionDetectionAlgorithm.inl.
| #define InFront | ( | a | ) |
Definition at line 261 of file CollisionDetectionAlgorithm.inl.
| #define On | ( | a | ) |
Definition at line 267 of file CollisionDetectionAlgorithm.inl.
| #define REAL_EQUAL | ( | a, | |
| b ) |
Definition at line 10 of file CollisionDetectionAlgorithm.inl.
| #define REAL_GREAT | ( | a, | |
| b ) |
Definition at line 11 of file CollisionDetectionAlgorithm.inl.
| #define REAL_infinity 1.0e30 |
Definition at line 9 of file CollisionDetectionAlgorithm.inl.
| #define REAL_LESS | ( | a, | |
| b ) |
Definition at line 12 of file CollisionDetectionAlgorithm.inl.