|
PeriDyno 1.2.1
|
Loading...
Searching...
No Matches
|
PeriDyno 1.2.1
|
#include <CollisionDetectionAlgorithm.h>
Public Types | |
| using | Quat1f = Quat<Real> |
| using | Coord3D = Vector<Real, 3> |
| using | Matrix3D = SquareMatrix<Real, 3> |
| using | Transform3D = Transform<Real, 3> |
| using | Tet3D = TTet3D<Real> |
| using | Sphere3D = TSphere3D<Real> |
| using | Segment3D = TSegment3D<Real> |
| using | OBox3D = TOrientedBox3D<Real> |
| using | Capsule3D = TCapsule3D<Real> |
| using | Triangle3D = TTriangle3D<Real> |
| using | Manifold = TManifold<Real> |
| using | SeparationData = TSeparationData<Real> |
Static Public Member Functions | |
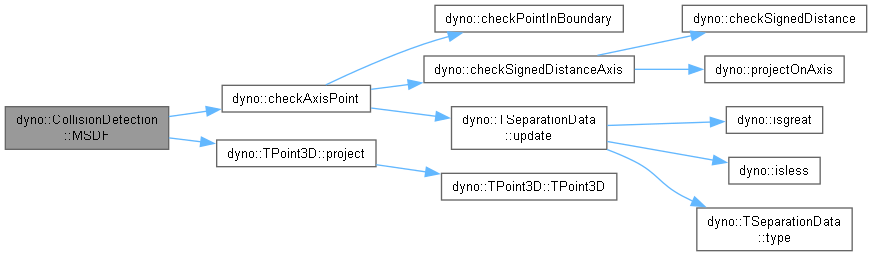
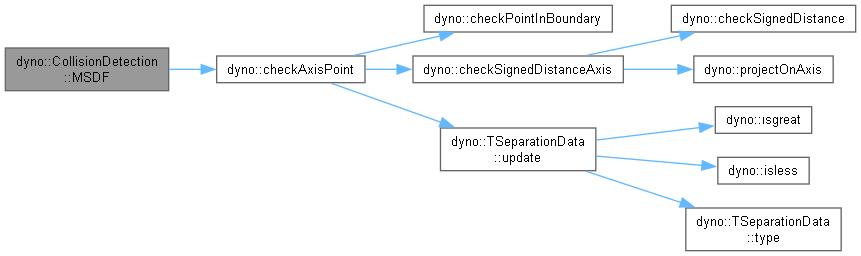
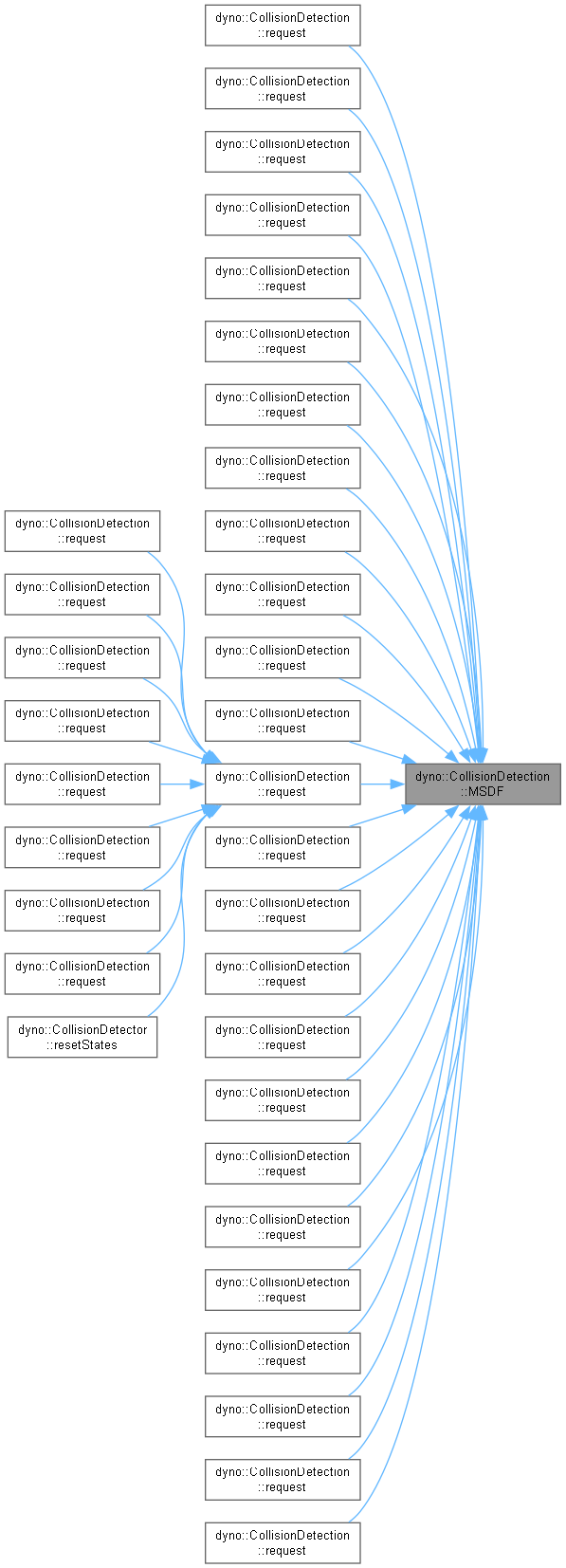
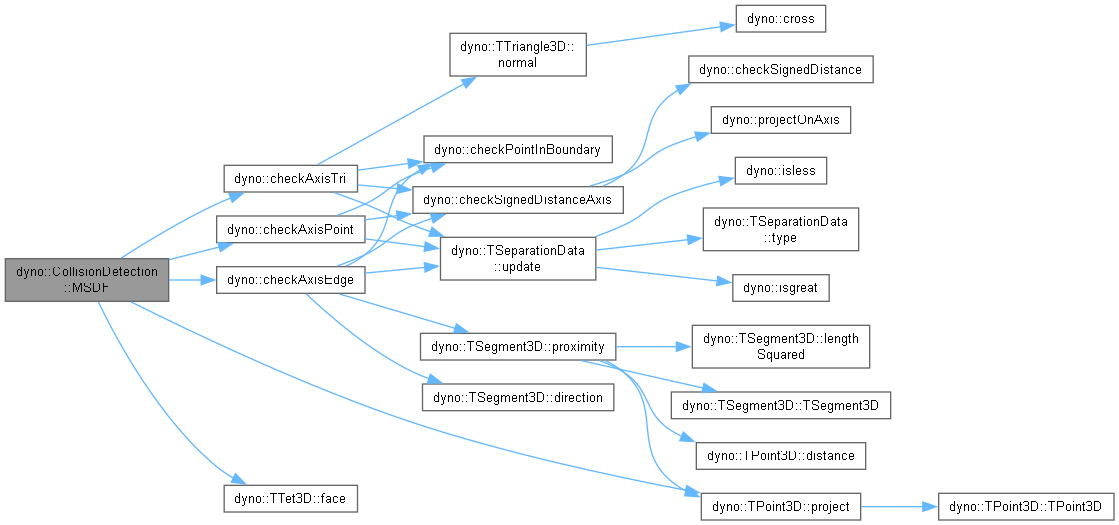
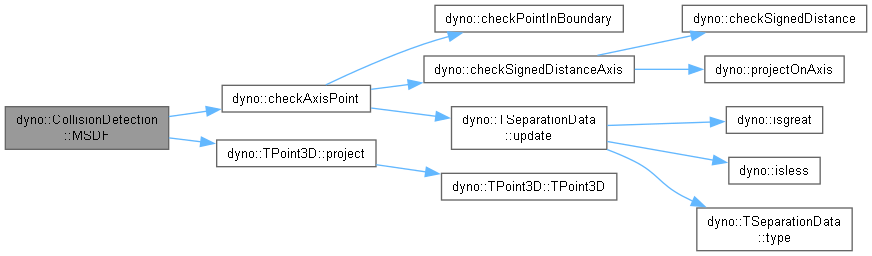
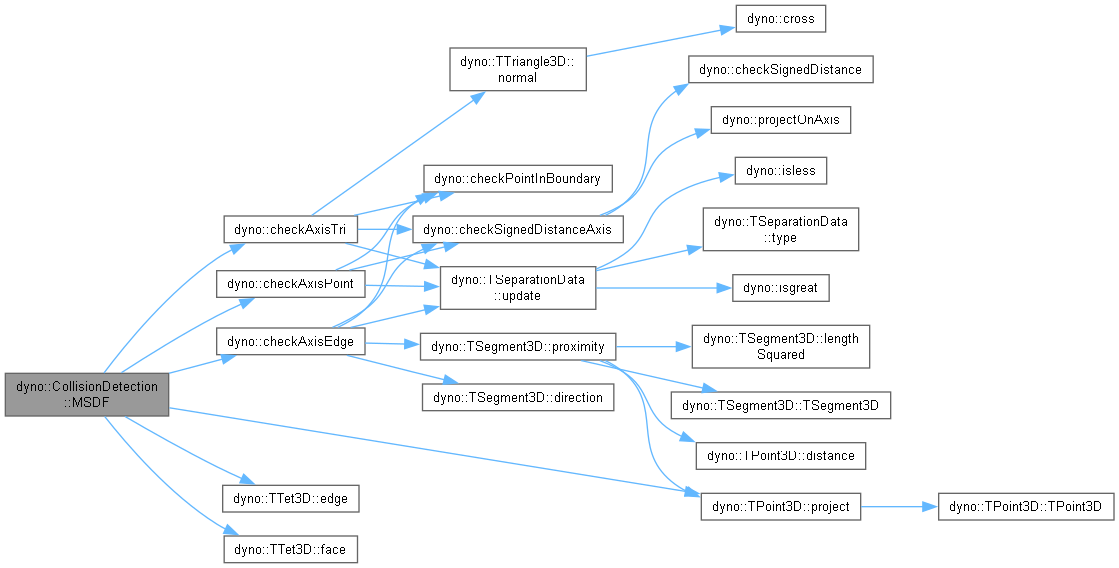
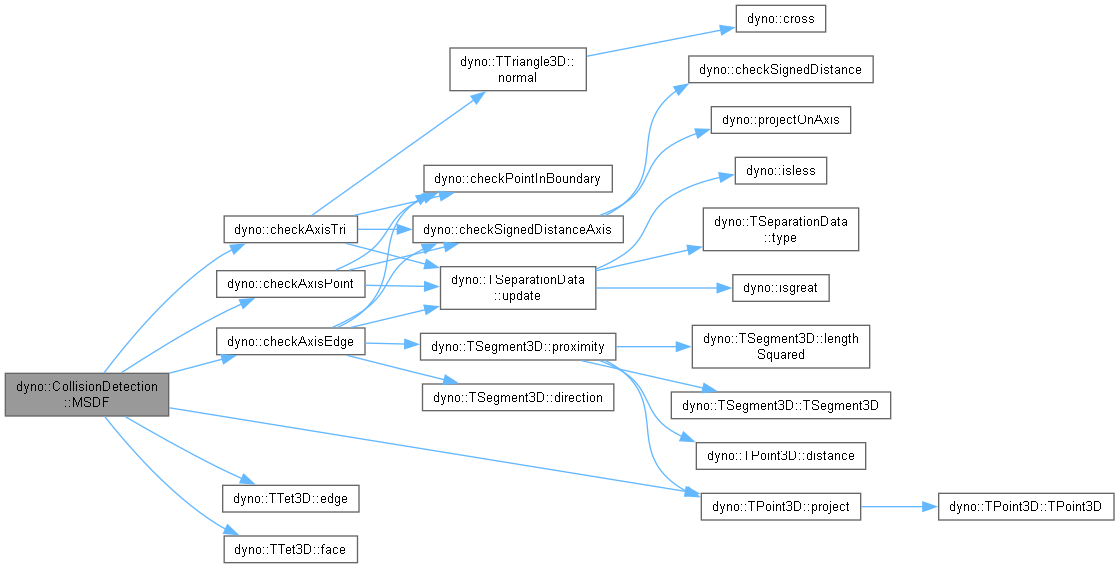
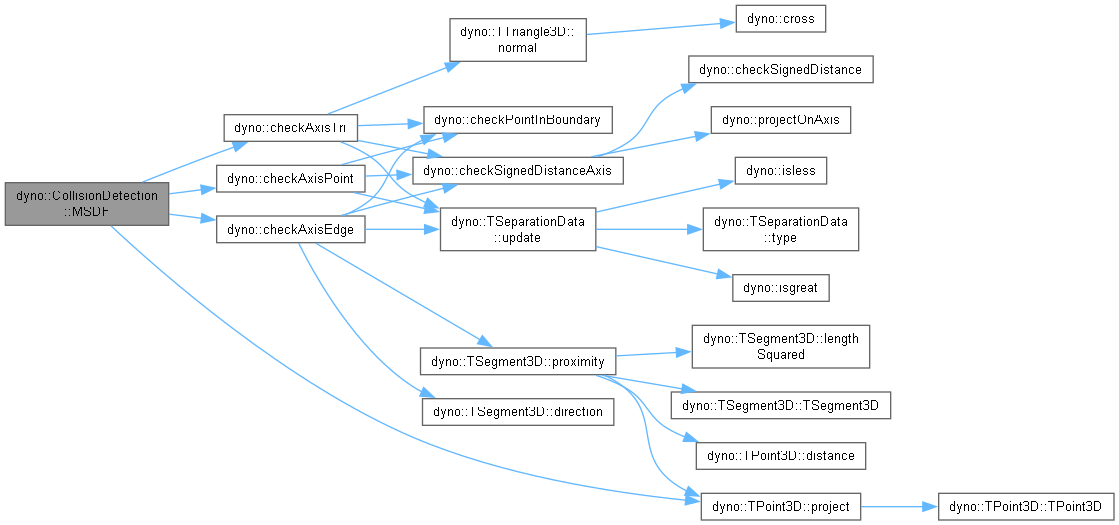
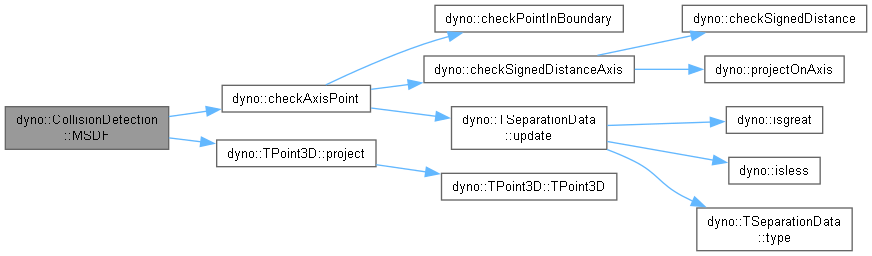
| static DYN_FUNC void | MSDF (SeparationData &sat, const Sphere3D &sphereA, const Sphere3D &sphereB, const Real radiusA, const Real radiusB) |
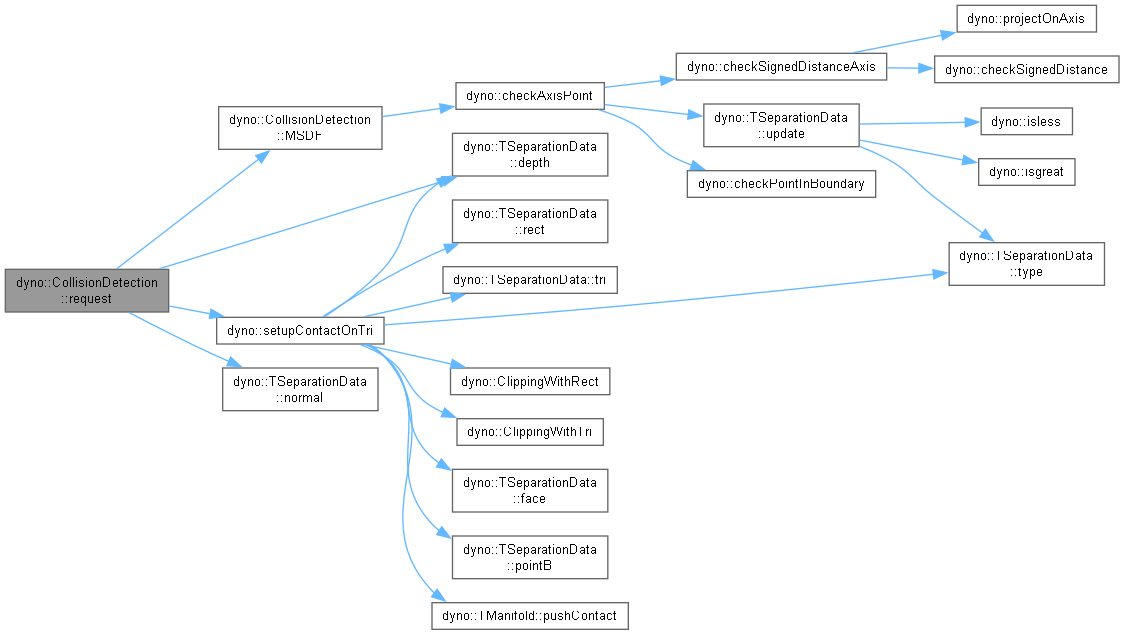
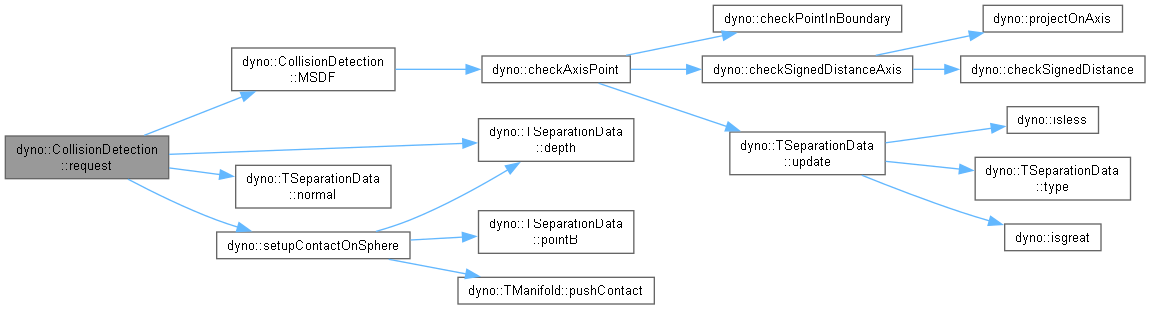
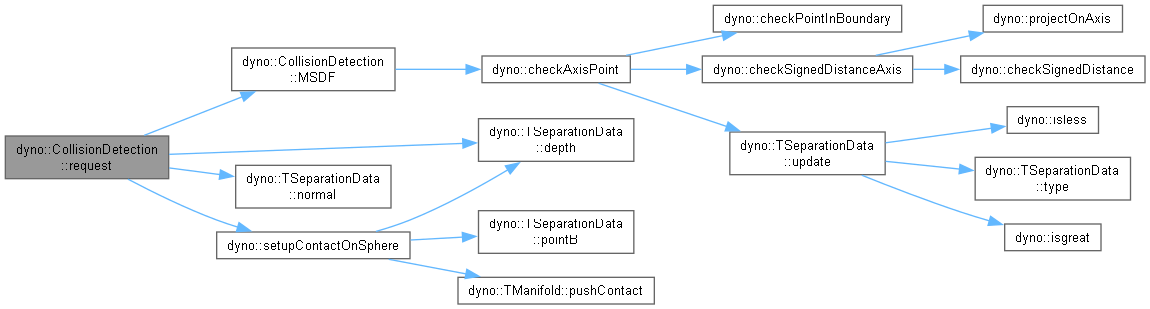
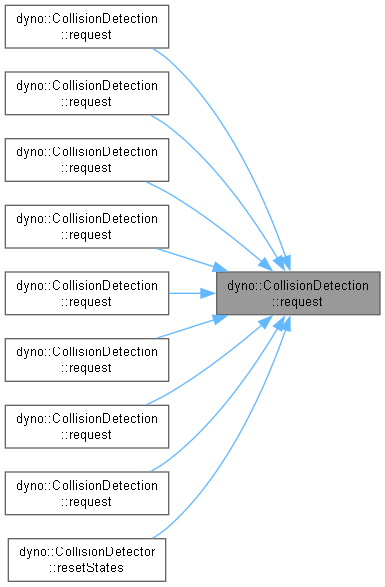
| static DYN_FUNC void | request (Manifold &m, const Sphere3D &sphereA, const Sphere3D &sphereB, const Real radiusA, const Real radiusB) |
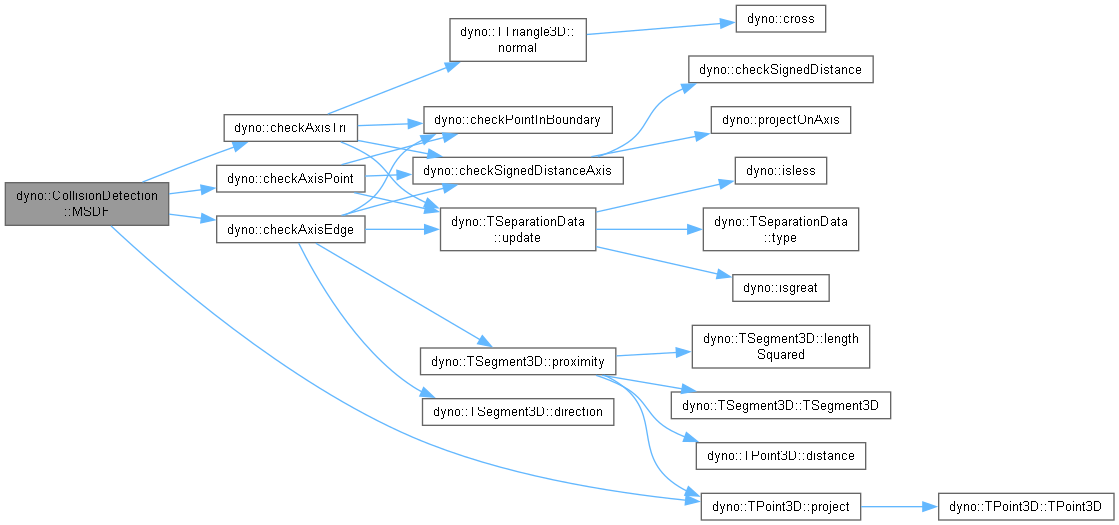
| static DYN_FUNC void | MSDF (SeparationData &sat, const Segment3D &segA, const Sphere3D &sphereB, const Real radiusA, const Real radiusB) |
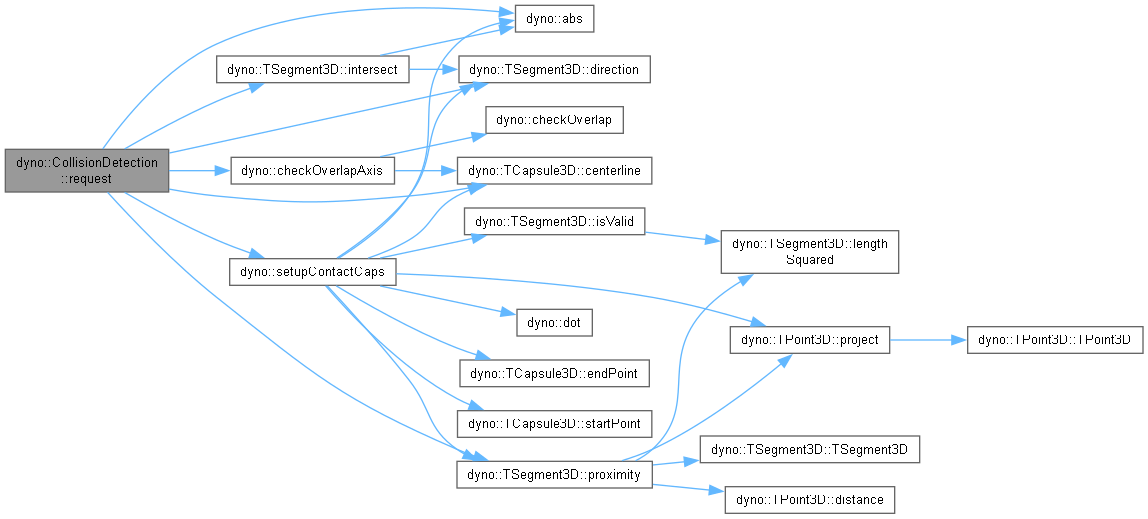
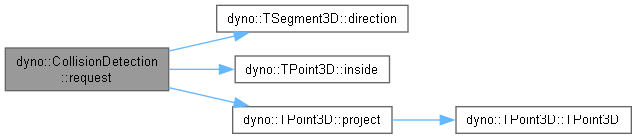
| static DYN_FUNC void | request (Manifold &m, const Segment3D &segA, const Sphere3D &sphereB, const Real radiusA, const Real radiusB) |
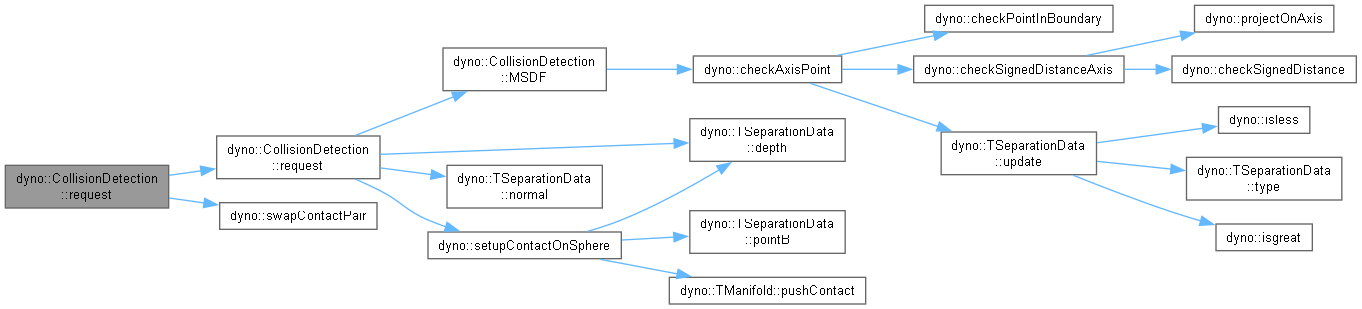
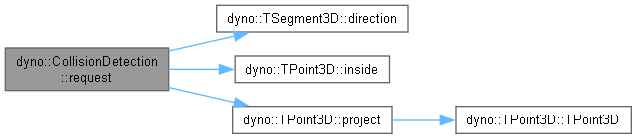
| static DYN_FUNC void | request (Manifold &m, const Sphere3D &sphereA, const Segment3D &segB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const Triangle3D &triA, const Sphere3D &sphereB, const Real radiusA, const Real radiusB) |
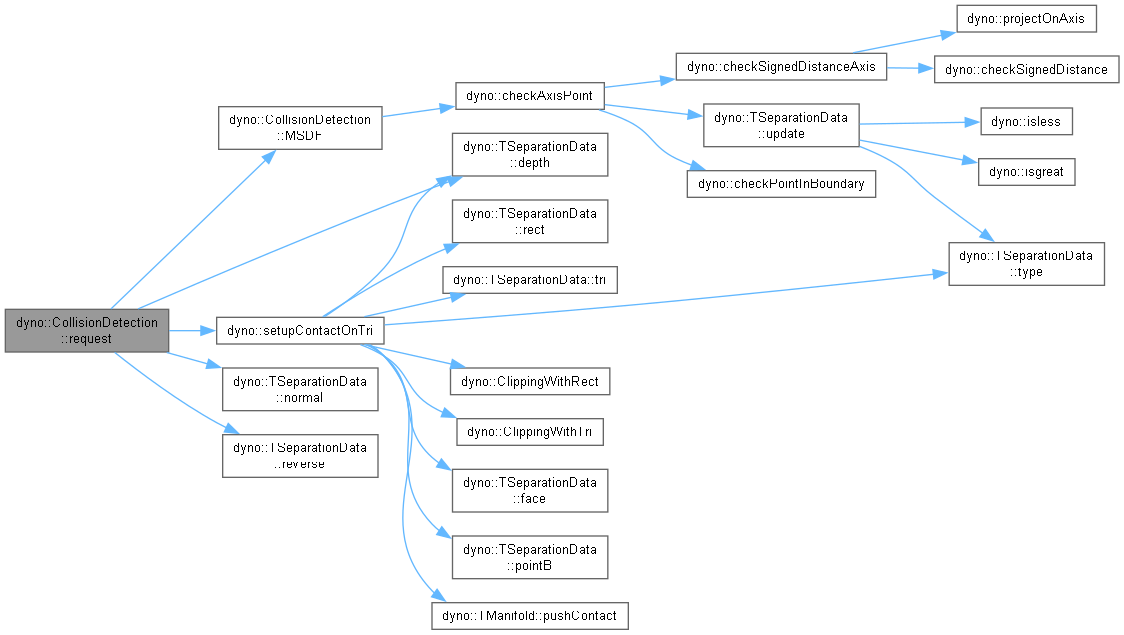
| static DYN_FUNC void | request (Manifold &m, const Triangle3D &triA, const Sphere3D &sphereB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Sphere3D &sphereA, const Triangle3D &triB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const Tet3D &tetA, const Sphere3D &sphereB, const Real radiusA, const Real radiusB) |
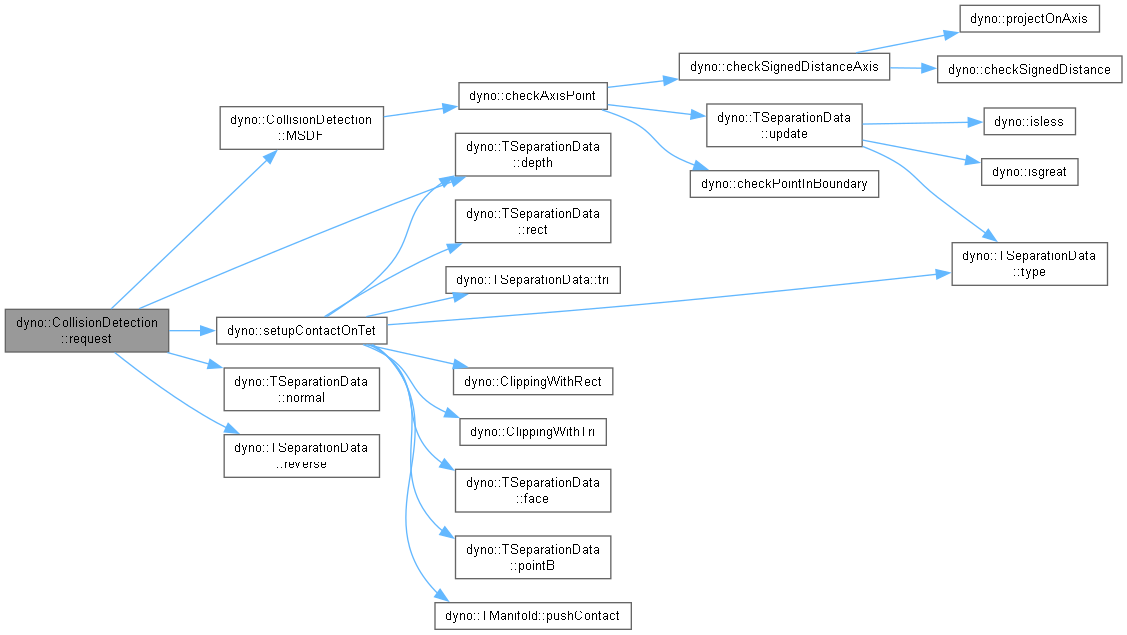
| static DYN_FUNC void | request (Manifold &m, const Tet3D &tetA, const Sphere3D &sphereB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Sphere3D &sphereA, const Tet3D &tetB, const Real radiusA, const Real radiusB) |
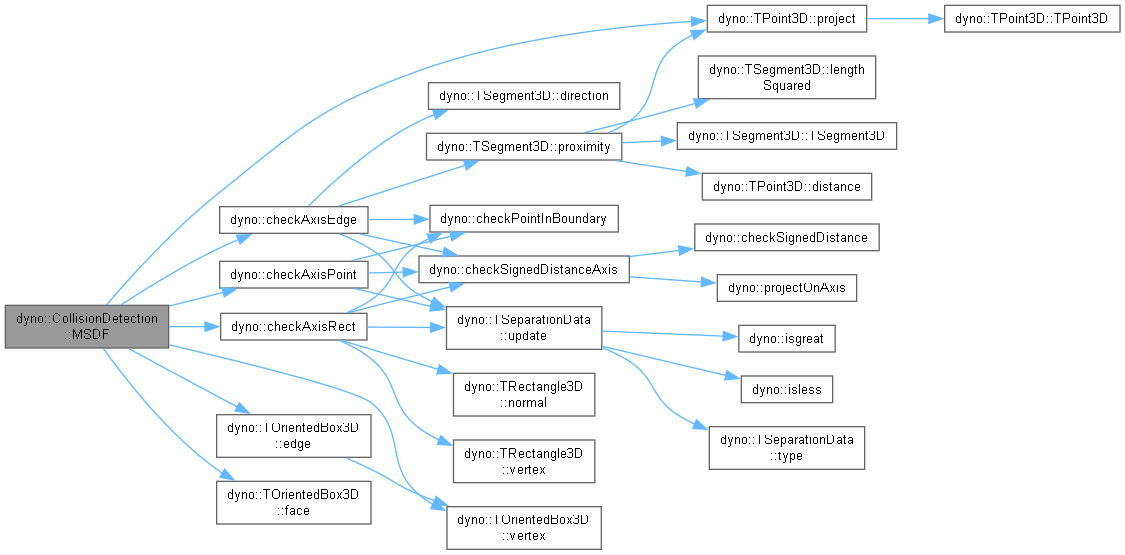
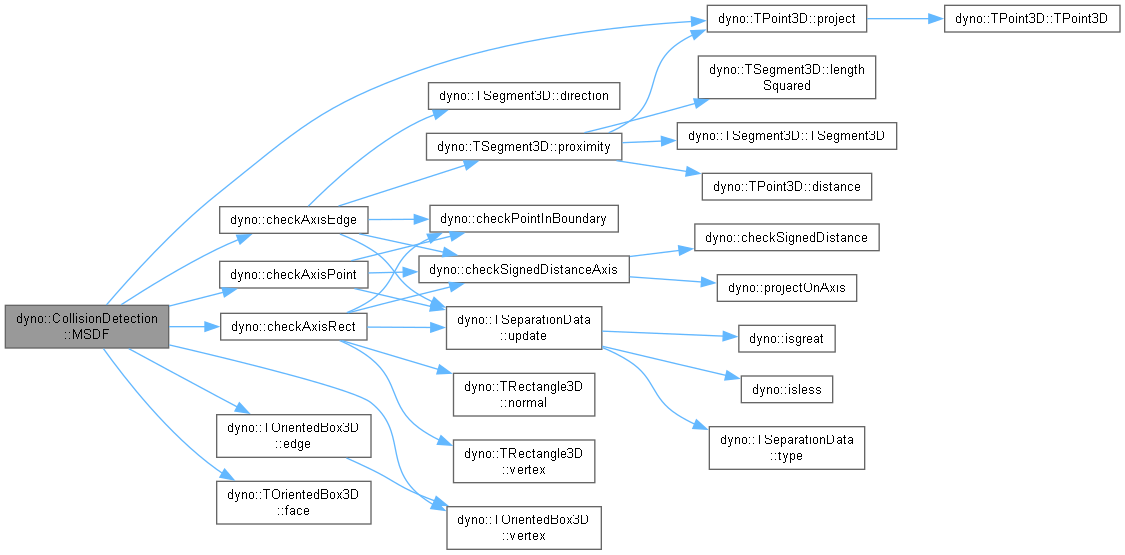
| static DYN_FUNC void | MSDF (SeparationData &sat, const OBox3D &boxA, const Sphere3D &sphereB, const Real radiusA, const Real radiusB) |
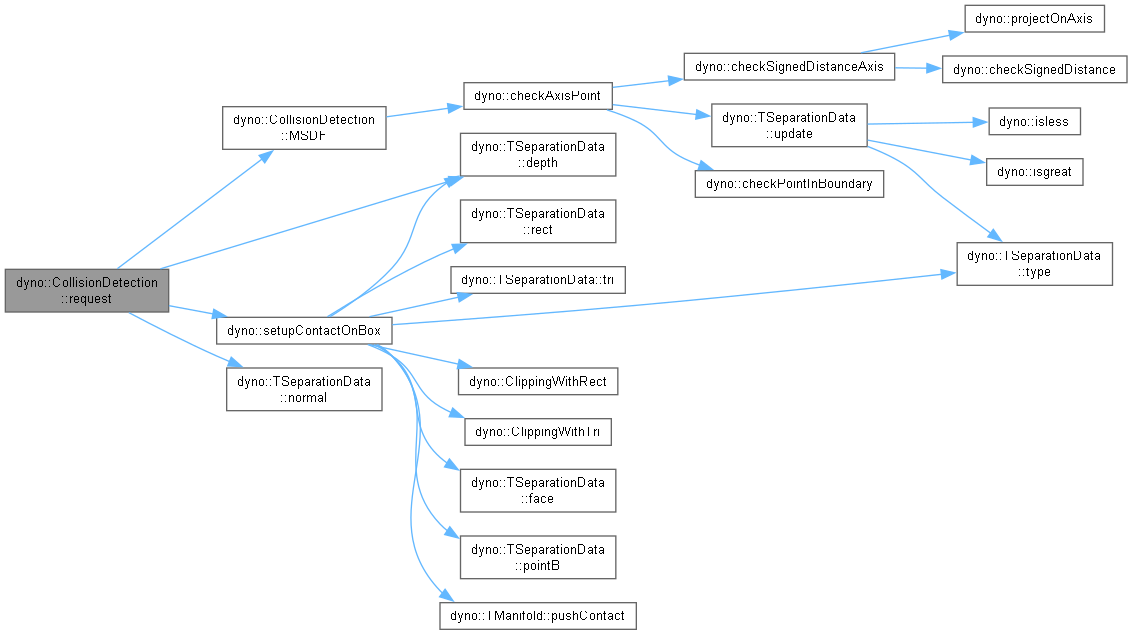
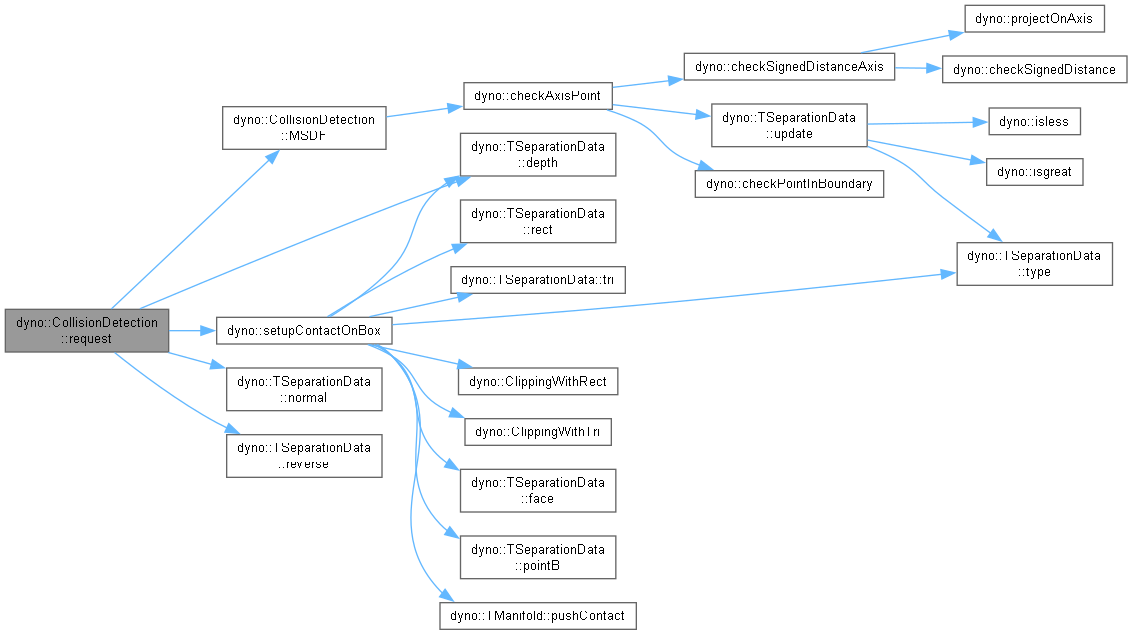
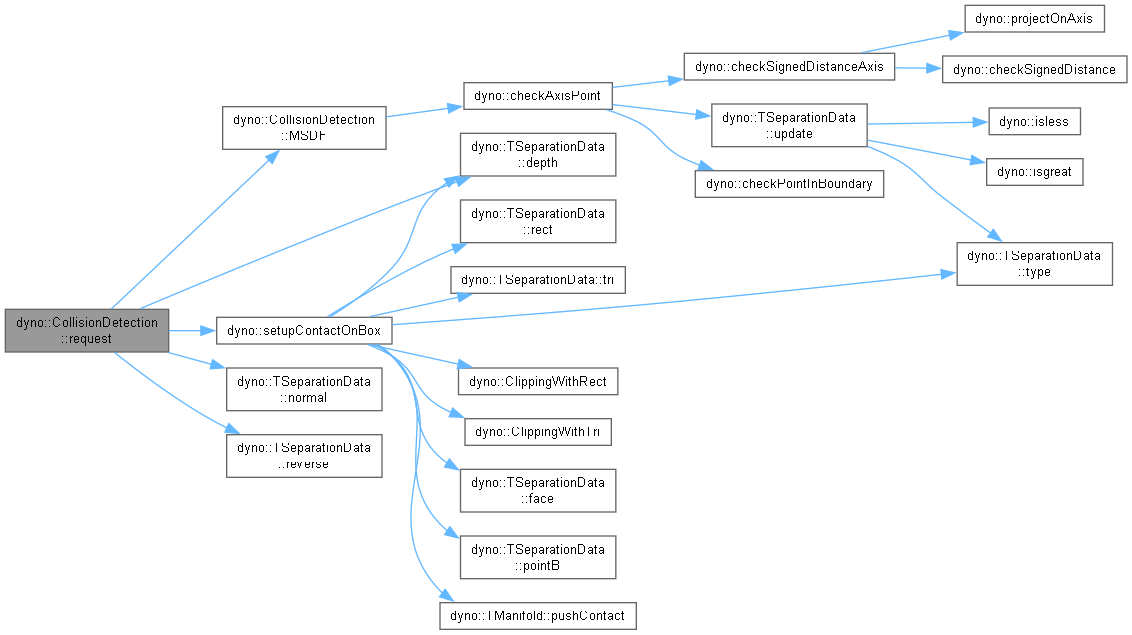
| static DYN_FUNC void | request (Manifold &m, const OBox3D &boxA, const Sphere3D &sphereB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Sphere3D &sphereA, const OBox3D &boxB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const Segment3D &segA, const Segment3D &segB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Segment3D &segA, const Segment3D &segB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const Triangle3D &triA, const Segment3D &segB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Triangle3D &triA, const Segment3D &segB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Segment3D &segA, const Triangle3D &triB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const Tet3D &tetA, const Segment3D &segB, const Real radiusA, const Real radiusB) |
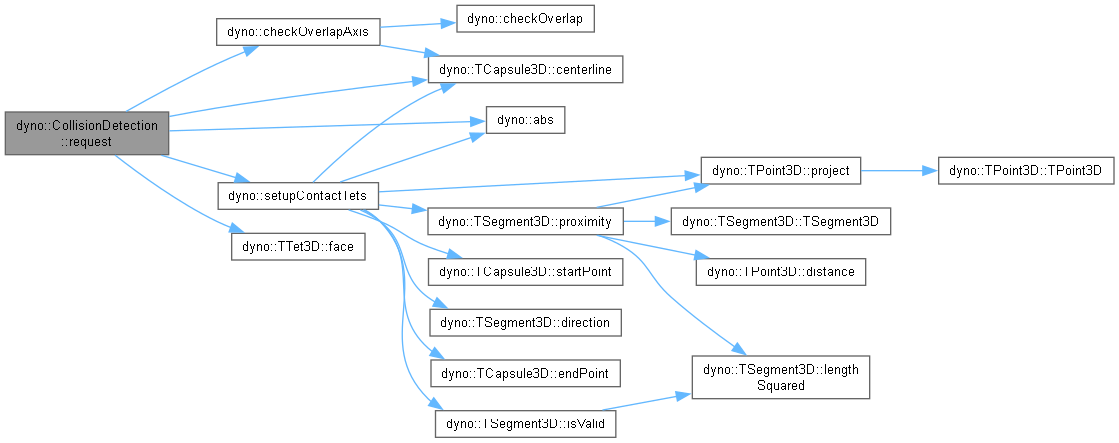
| static DYN_FUNC void | request (Manifold &m, const Tet3D &tetA, const Segment3D &segB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Segment3D &segA, const Tet3D &tetB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const OBox3D &boxA, const Segment3D &segB, const Real radiusA, const Real radiusB) |
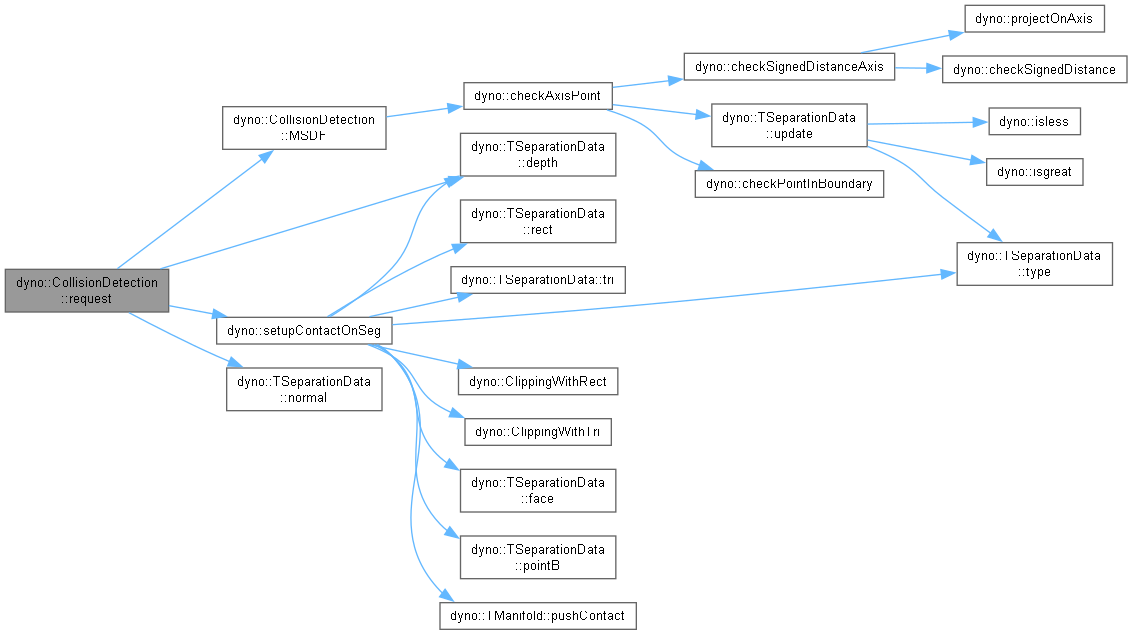
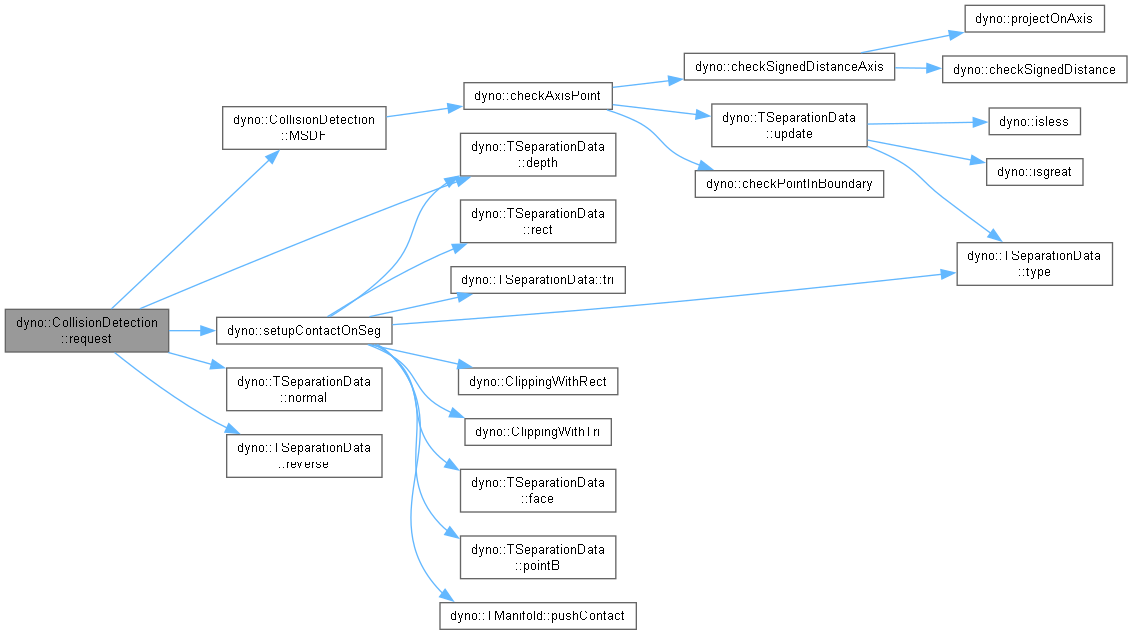
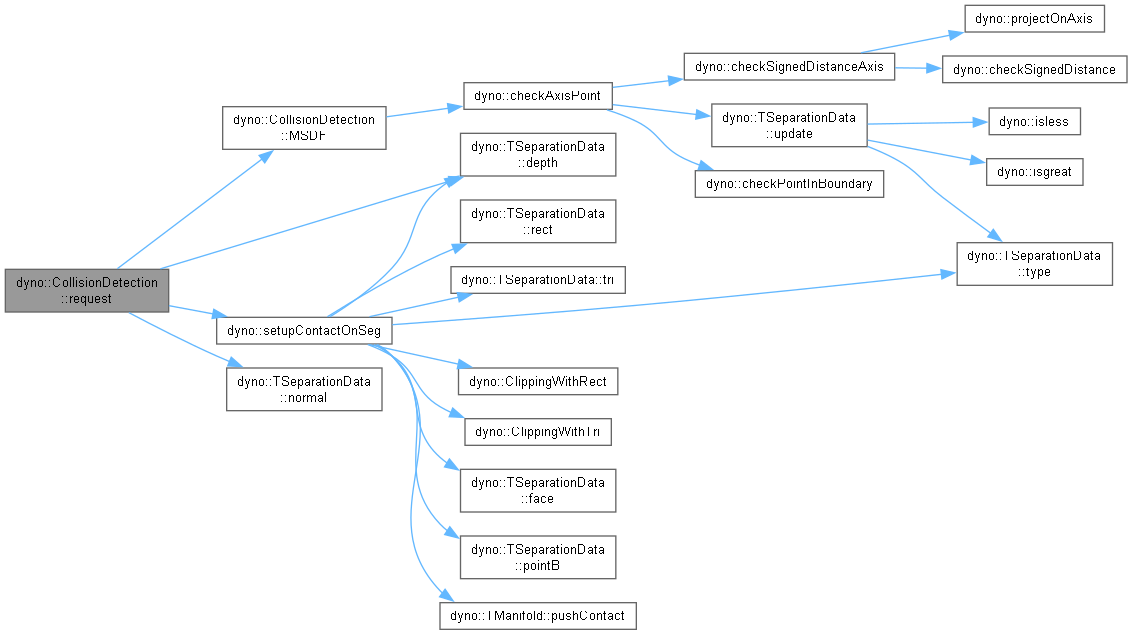
| static DYN_FUNC void | request (Manifold &m, const OBox3D &boxA, const Segment3D &segB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Segment3D &segA, const OBox3D &boxB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const Triangle3D &triA, const Triangle3D &triB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Triangle3D &triA, const Triangle3D &triB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const Tet3D &tetA, const Triangle3D &triB, const Real radiusA, const Real radiusB) |
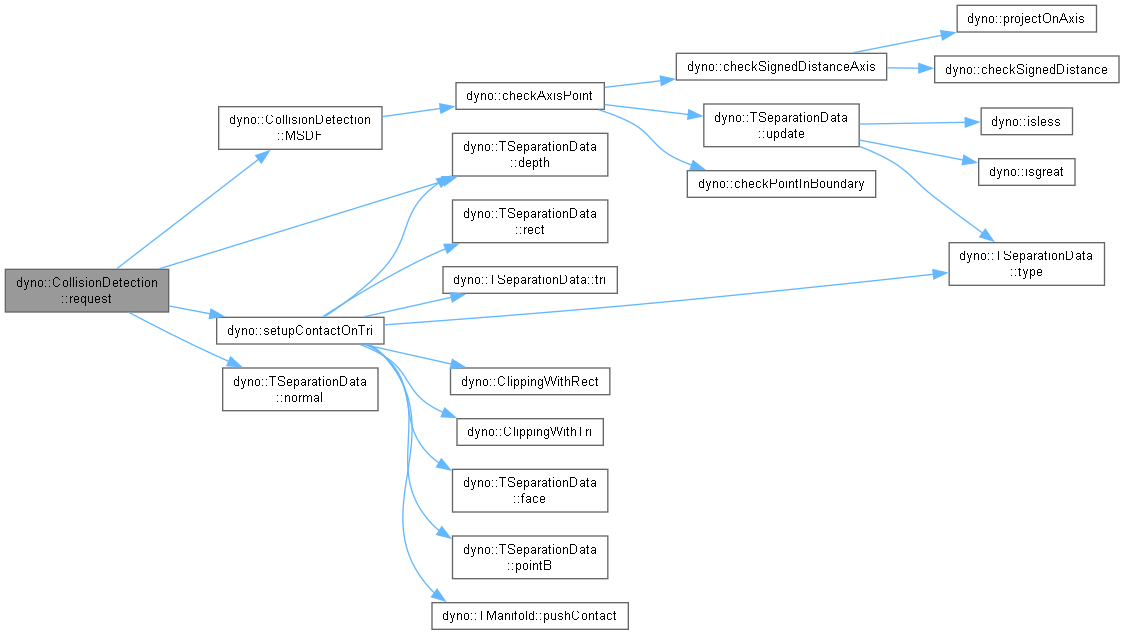
| static DYN_FUNC void | request (Manifold &m, const Tet3D &tetA, const Triangle3D &triB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Triangle3D &triA, const Tet3D &tetB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const OBox3D &boxA, const Triangle3D &triB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const OBox3D &boxA, const Triangle3D &triB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Triangle3D &triA, const OBox3D &boxB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const Tet3D &tetA, const Tet3D &tetB, const Real radiusA, const Real radiusB) |
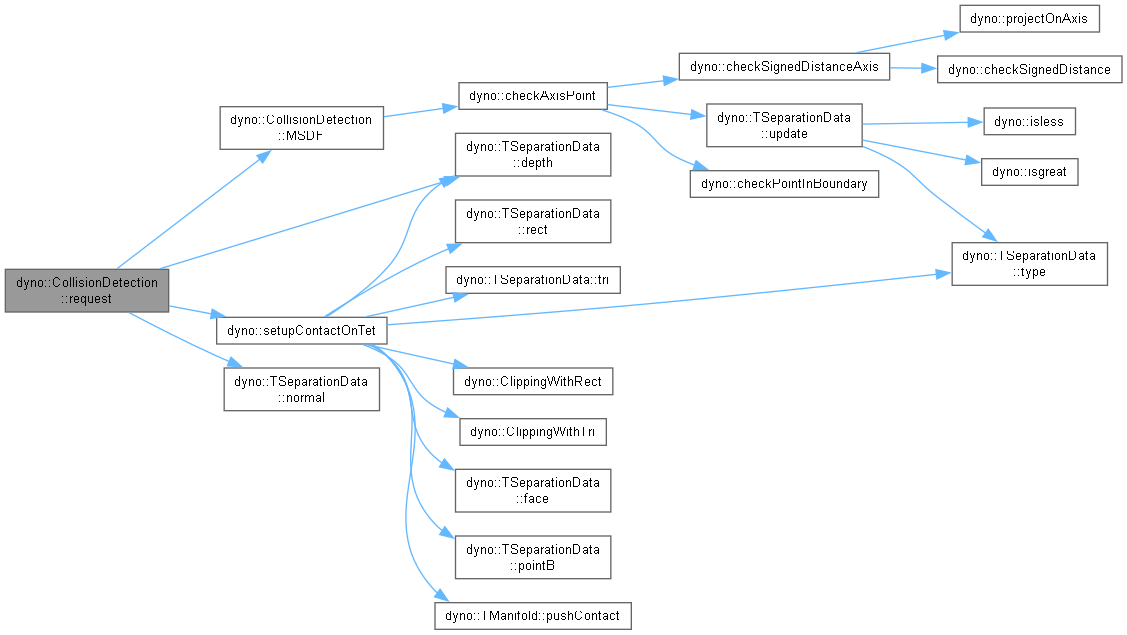
| static DYN_FUNC void | request (Manifold &m, const Tet3D &tetA, const Tet3D &tetB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const OBox3D &boxA, const Tet3D &tetB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const OBox3D &boxA, const Tet3D &tetB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const Tet3D &tetA, const OBox3D &boxB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | MSDF (SeparationData &sat, const OBox3D &boxA, const OBox3D &boxB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const OBox3D &boxA, const OBox3D &boxB, const Real radiusA, const Real radiusB) |
| static DYN_FUNC void | request (Manifold &m, const OBox3D box0, const OBox3D box1) |
| static DYN_FUNC void | request (Manifold &m, const Sphere3D &sphere, const OBox3D &box) |
| static DYN_FUNC void | request (Manifold &m, const OBox3D &box, const Sphere3D &sphere) |
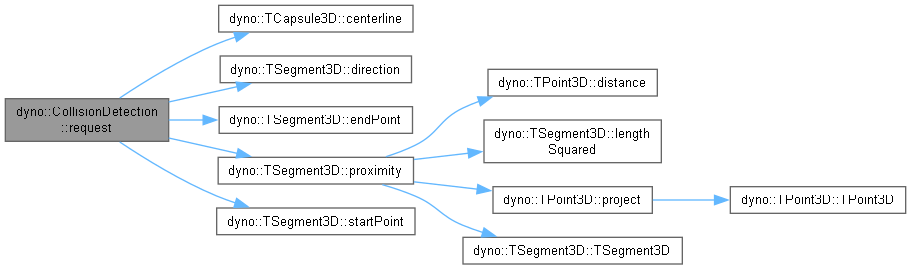
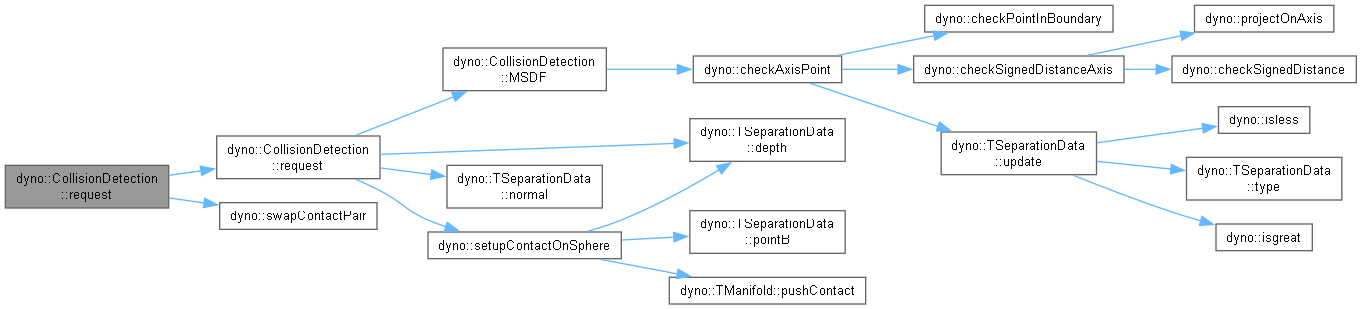
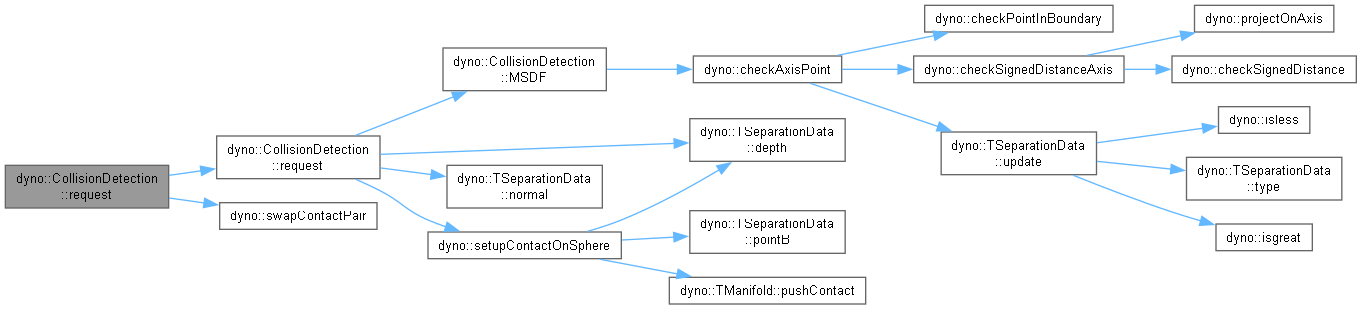
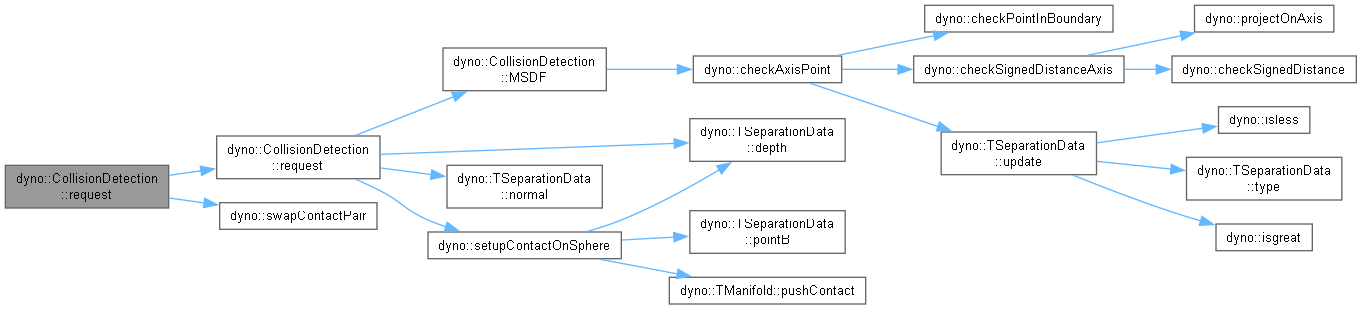
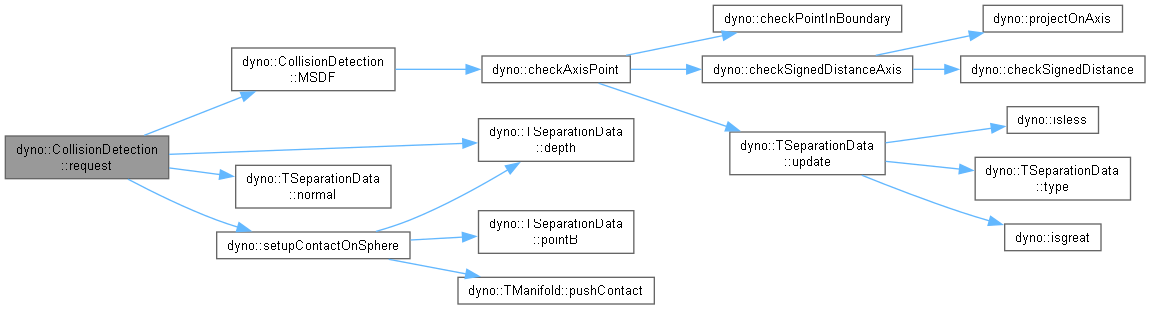
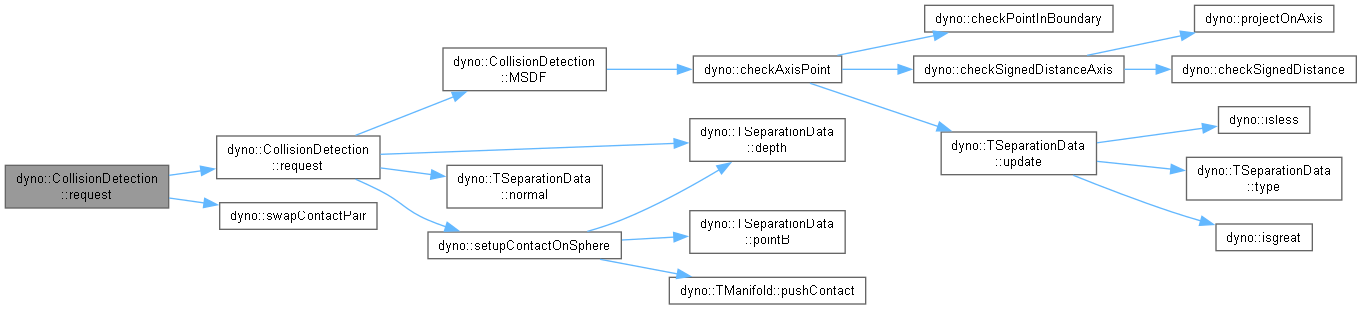
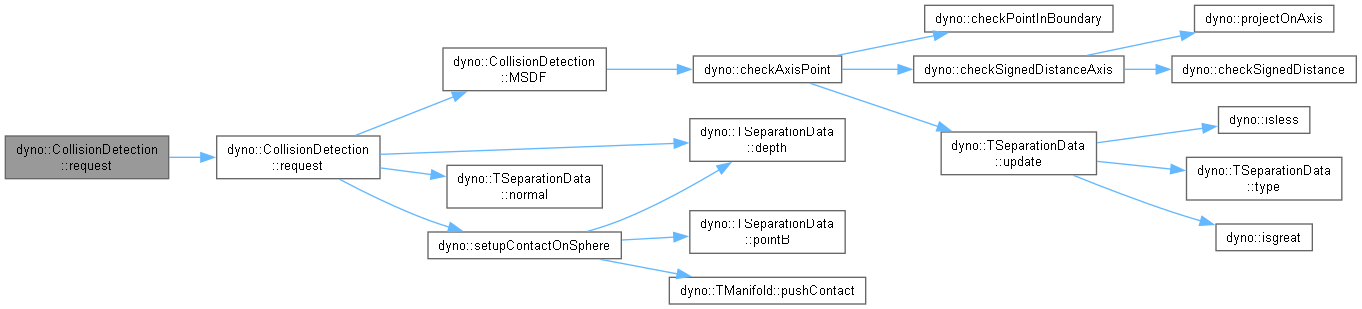
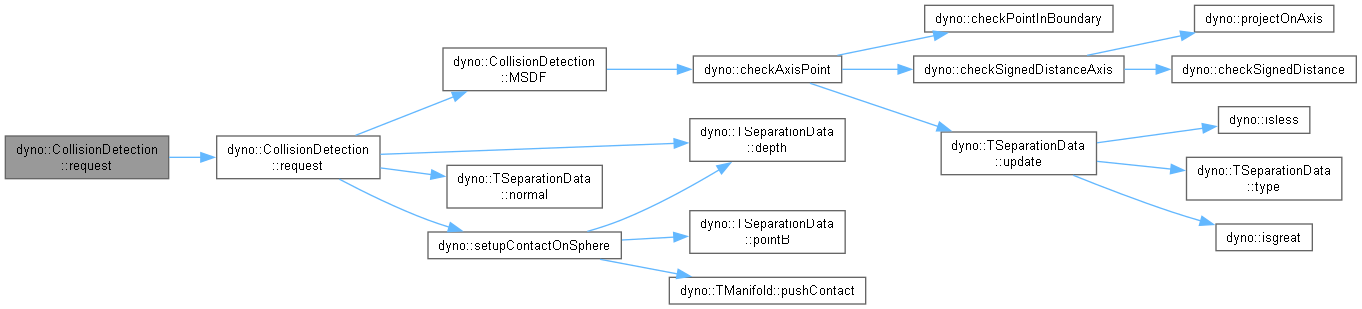
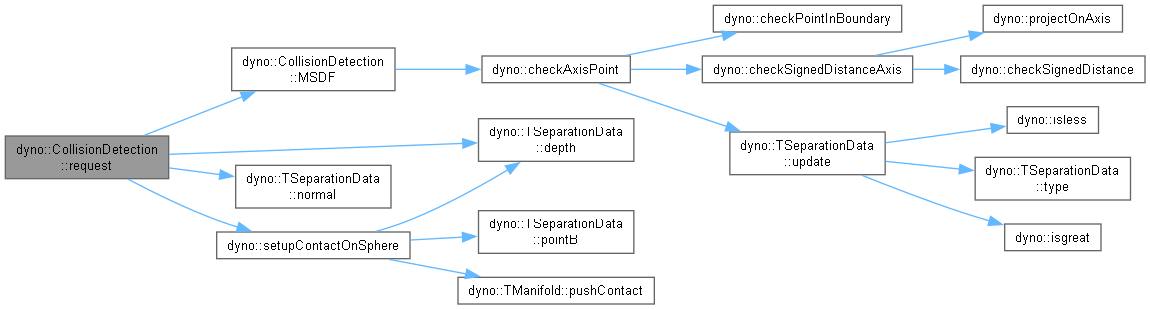
| static DYN_FUNC void | request (Manifold &m, const Sphere3D &sphere0, const Sphere3D &sphere1) |
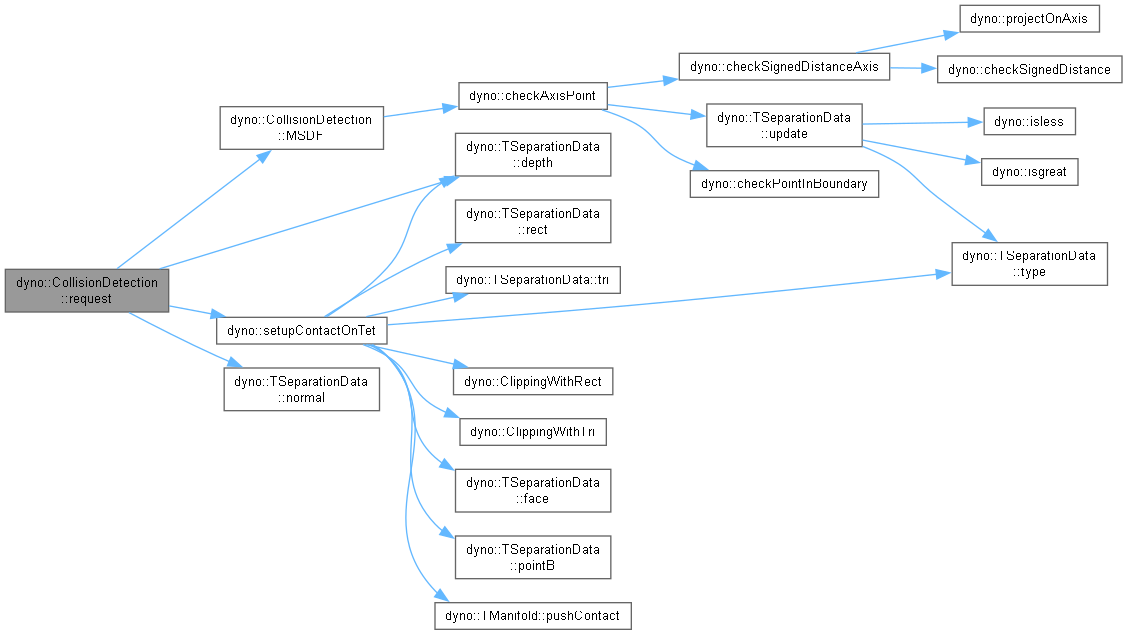
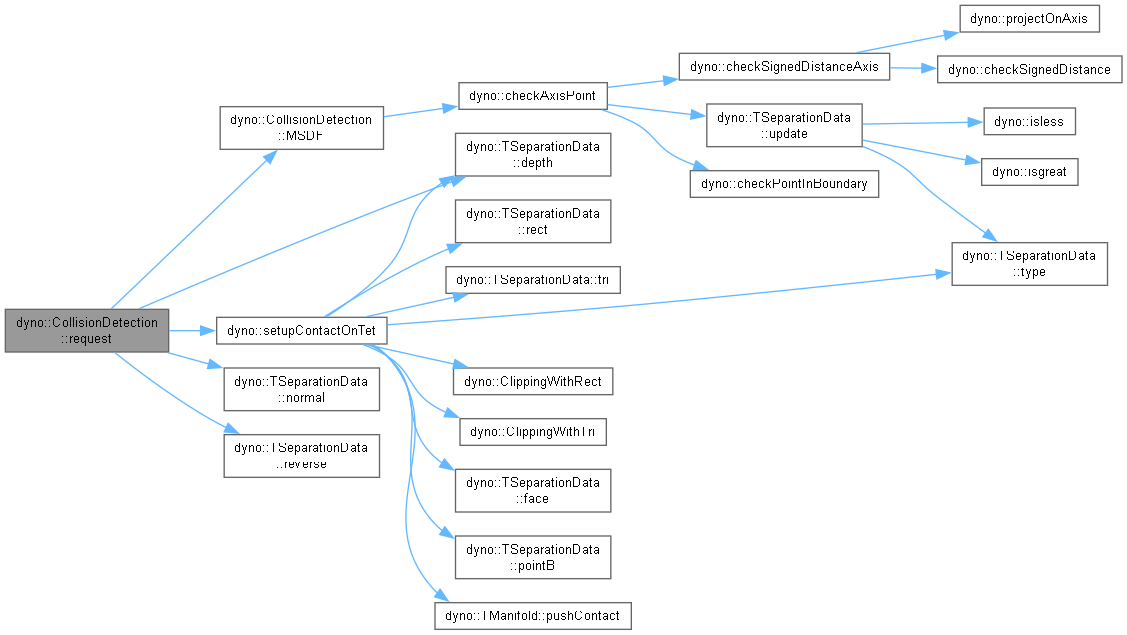
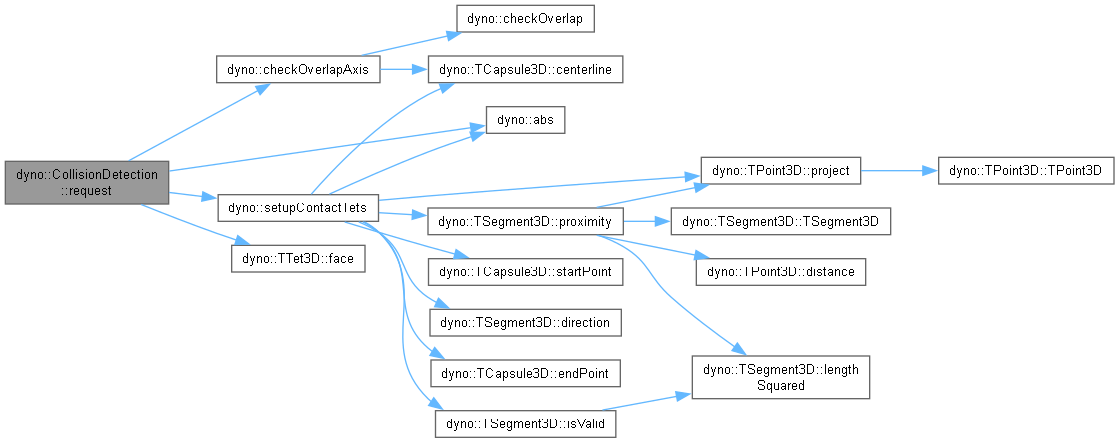
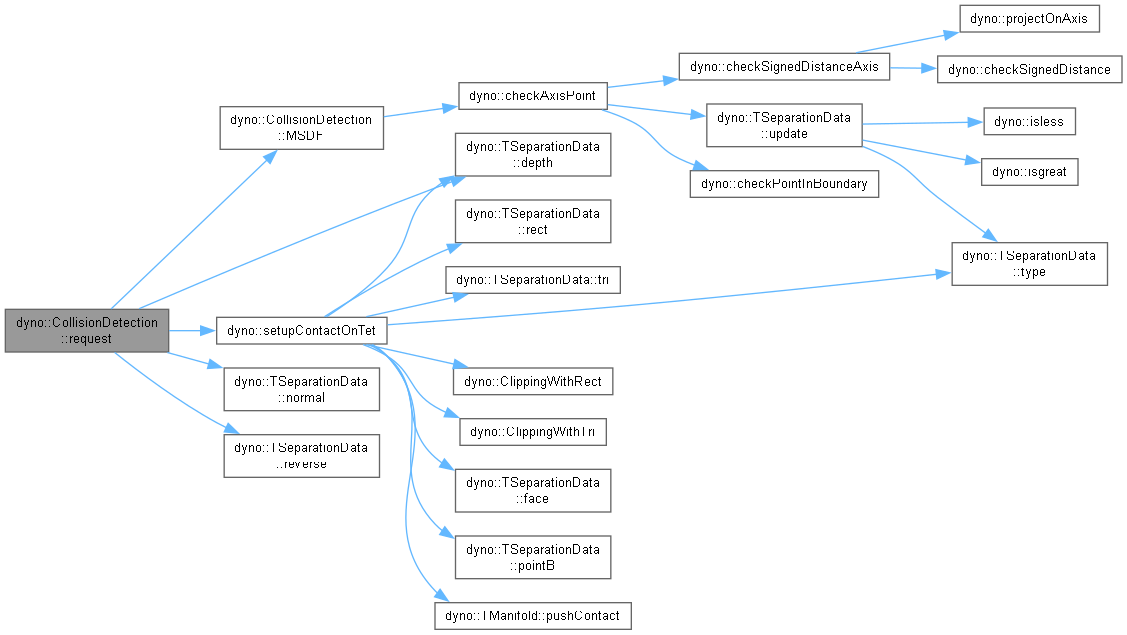
| static DYN_FUNC void | request (Manifold &m, const Tet3D &tet0, const Tet3D &tet1) |
| static DYN_FUNC void | request (Manifold &m, const Tet3D &tet, const OBox3D &box) |
| static DYN_FUNC void | request (Manifold &m, const OBox3D &box, const Tet3D &tet) |
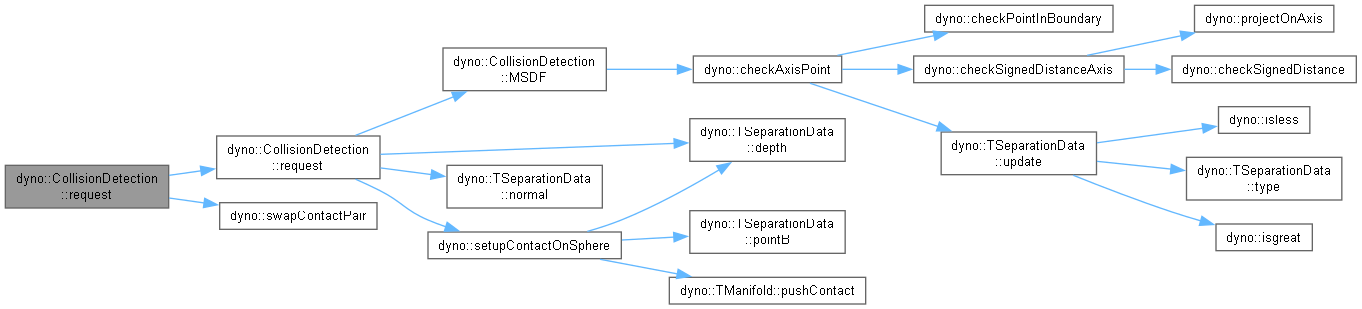
| static DYN_FUNC void | request (Manifold &m, const Sphere3D &sphere, const Tet3D &tet) |
| static DYN_FUNC void | request (Manifold &m, const Tet3D &tet, const Sphere3D &sphere) |
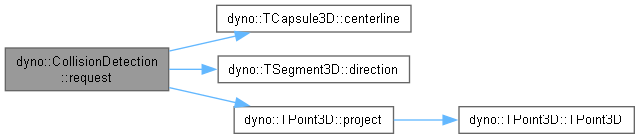
| static DYN_FUNC void | request (Manifold &m, const Sphere3D &sphere, const Capsule3D &cap) |
| static DYN_FUNC void | request (Manifold &m, const Capsule3D &cap, const Sphere3D &sphere) |
| static DYN_FUNC void | request (Manifold &m, const Capsule3D &cap0, const Capsule3D &cap1) |
| static DYN_FUNC void | request (Manifold &m, const Sphere3D &sphere, const Triangle3D &tri) |
| static DYN_FUNC void | request (Manifold &m, const Triangle3D &tri, const Sphere3D &sphere) |
| static DYN_FUNC void | request (Manifold &m, const Triangle3D &tri, const Capsule3D cap) |
| static DYN_FUNC void | request (Manifold &m, const Capsule3D &cap, const Tet3D &tet) |
| static DYN_FUNC void | request (Manifold &m, const Tet3D &tet, const Capsule3D &cap) |
| static DYN_FUNC void | request (Manifold &m, const Capsule3D &cap, const OBox3D &box) |
| static DYN_FUNC void | request (Manifold &m, const OBox3D &box, const Capsule3D &cap) |
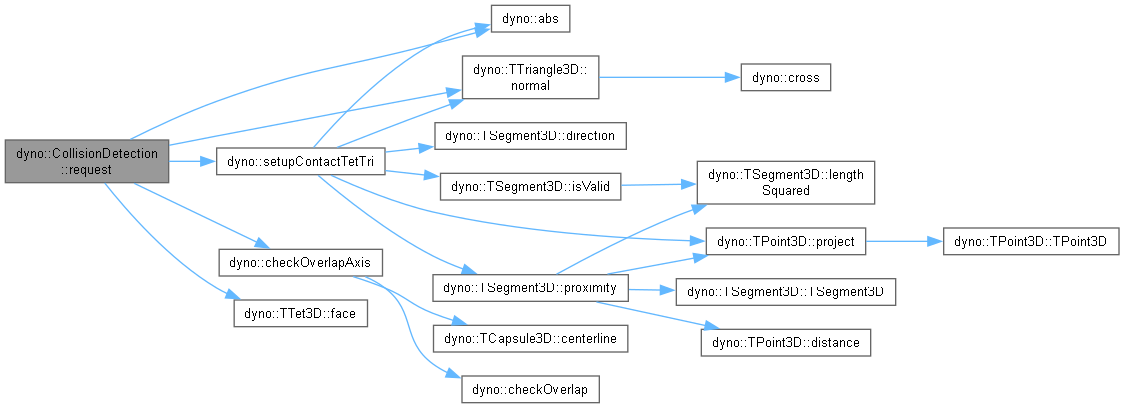
| static DYN_FUNC void | request (Manifold &m, const Tet3D &tet, const Triangle3D &tri) |
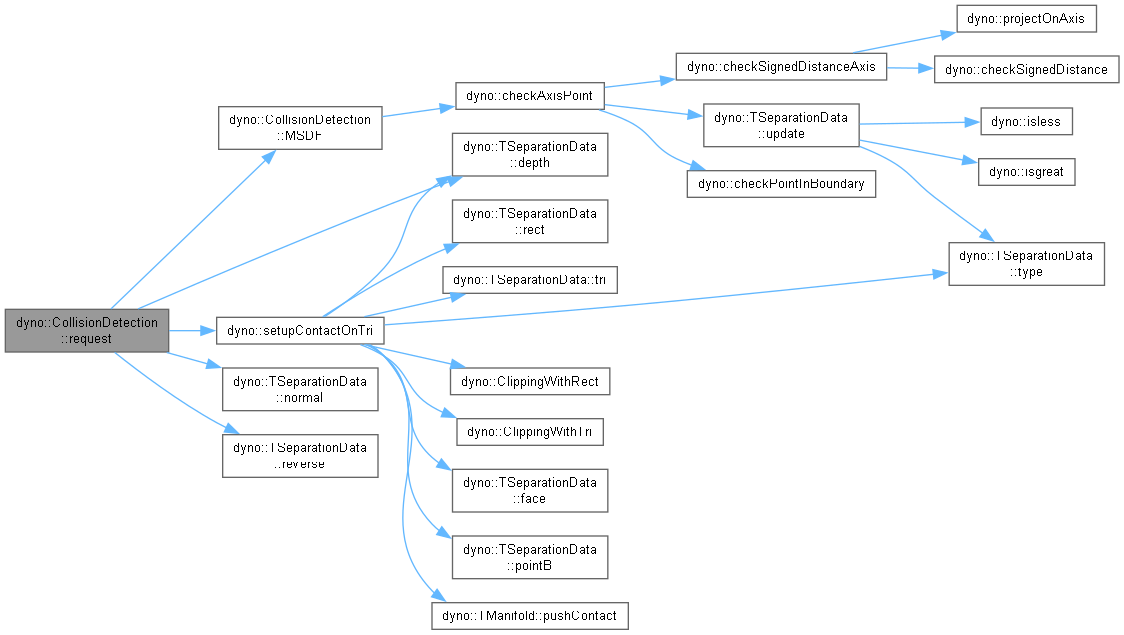
| static DYN_FUNC void | request (Manifold &m, const Triangle3D &tri, const Tet3D &tet) |
| static DYN_FUNC void | request (Manifold &m, const OBox3D &box, const Triangle3D &tri) |
Definition at line 71 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::Capsule3D = TCapsule3D<Real> |
Definition at line 82 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::Coord3D = Vector<Real, 3> |
Definition at line 75 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::Manifold = TManifold<Real> |
Definition at line 85 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::Matrix3D = SquareMatrix<Real, 3> |
Definition at line 76 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::OBox3D = TOrientedBox3D<Real> |
Definition at line 81 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::Quat1f = Quat<Real> |
Definition at line 74 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::Segment3D = TSegment3D<Real> |
Definition at line 80 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::SeparationData = TSeparationData<Real> |
Definition at line 86 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::Sphere3D = TSphere3D<Real> |
Definition at line 79 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::Tet3D = TTet3D<Real> |
Definition at line 78 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::Transform3D = Transform<Real, 3> |
Definition at line 77 of file CollisionDetectionAlgorithm.h.
| using dyno::CollisionDetection< Real >::Triangle3D = TTriangle3D<Real> |
Definition at line 83 of file CollisionDetectionAlgorithm.h.
|
static |
Definition at line 2773 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1931 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1474 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2636 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2380 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1524 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1291 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1261 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1739 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1416 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2510 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2245 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1615 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1357 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2135 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 4215 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 3336 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 4381 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 3237 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 3984 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 4533 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 5603 of file CollisionDetectionAlgorithm.inl.
|
static |
|
static |
Definition at line 2868 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2114 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1505 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2754 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2491 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2943 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2095 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1589 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1331 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1892 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1719 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 3312 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 3213 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 5611 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 5642 of file CollisionDetectionAlgorithm.inl.

|
static |
Definition at line 4541 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1487 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1305 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1273 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1429 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1372 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 4525 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 5444 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 5634 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 4223 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 5325 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2736 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1910 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1448 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2617 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2361 of file CollisionDetectionAlgorithm.inl.
|
static |
|
static |
Definition at line 5671 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 4373 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2473 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1700 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 1390 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2343 of file CollisionDetectionAlgorithm.inl.
|
static |
Definition at line 2225 of file CollisionDetectionAlgorithm.inl.