三种交互平台
平台介绍
PeriDyno物理引擎针对不同的任务、不同的研发对象,构建了多个开发平台,包括轻量级GLFW平台、交互式Qt平台以及端云协同WT平台。
1、轻量级GLFW平台
简介: GLFW是配合OpenGL使用的轻量级工具程序库,缩写自Graphics Library Framework(图形库框架)。GLFW的主要功能是创建并管理窗口和OpenGL上下文,同时还提供了处理键盘、鼠标输入的功能。
PeriDyno引擎中轻量级GLFW框架安装简单,运行效率较高,适用于学生及科研工作人员。引擎中还提供大量GLFW示例。在程序中以GLFW框架运行的示例均以GL开头。
界面介绍: GLFW界面相对简介,只包含仿真界面和工具栏。
- 仿真界面:用于显示仿真结果;
- 工具栏:
-
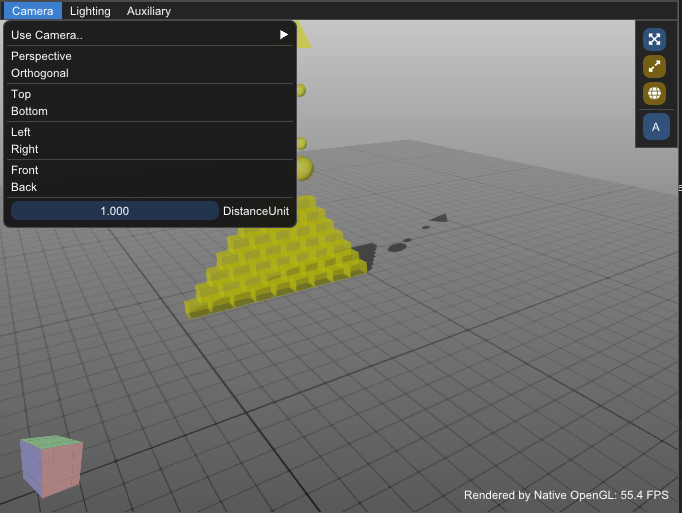
Camera:视角变换,通过调节相机相关属性来改变视角;
- Use Camera:提供orbit和Trackball两种相机模式 ;
- Perspective:透视投影,物体大小和观测距离相关,距离越近物体越大,距离越远物体越小;
- Orthogonal:正交投影,物体大小和观测距离无关。
- Top:俯视图;
- Bottom:仰视图;
- Left:左视图;
- Right:右视图;
- Front:主视图;
- Back:后视图;
- Auto Focue:自动聚焦;
- DistanceUnit:快速调节相机距离;
-
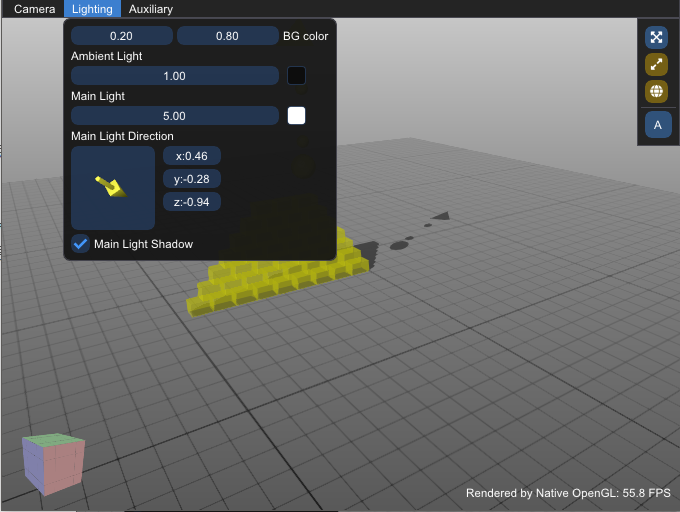
Lighting:光线相关属性;
- BG color:灯光的颜色,鼠标右键点击数值框,拖动改变数值;
- Ambient Light:环境光;
- Main Light:主要光;
- Main Light Direction:主要光照射方向;
- Main Light Shadow:是否显示主要光照射阴影;
-
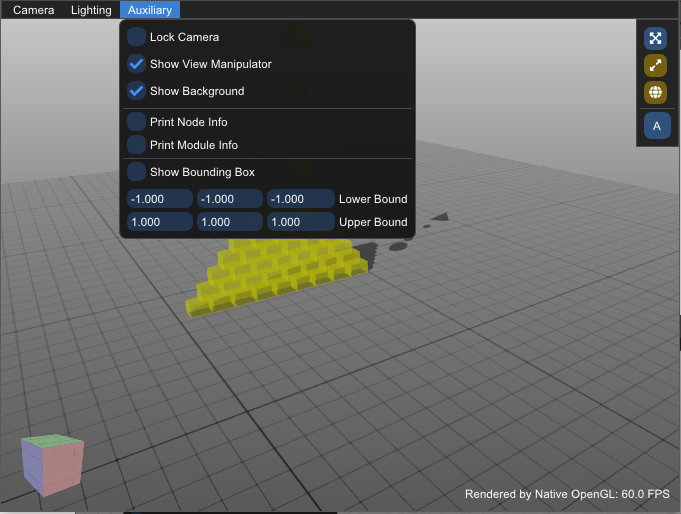
Auxiliary:辅助功能;
- Lock Camera:是否锁定摄像机;
- Show View Mainipulator:是否显示左下角的方位魔方;
- Show Background:是否显示背景网格;
- Print Node Info:是否打印节点输出信息;
- Print Module Info:是否打印模块输出信息;
- Show Bounding Box:是否显示box边界;
- Lower Bound:下边界设置;
- Upper Bound:上边界设置;
-
Edit:三维模型变换;
- Translate:平移变换;
- Scale:尺寸变换;
- Rotate:旋转变换;
- Focus:模型聚焦功能;

-
操作说明:
- 调节视角:Alt + 鼠标移动;
- 调节视角距离:Alt + 滚动鼠标中键;
- 开始仿真任务:空格键(程序启动时,默认停在第0帧。按下空格键后,开始仿真任务)。
2、交互式设计Qt平台
简介: Qt一个跨平台C++图形用户界面应用程序开发框架。它既可以开发GUI程序,也可以用于开发非GUI程序,比如控制台工具和服务器。Qt是面向对象的框架,使用特殊的代码生成扩展(称为元对象编译器(Meta Object Compiler, moc))以及一些宏。Qt易于扩展,而且允许组件编程。
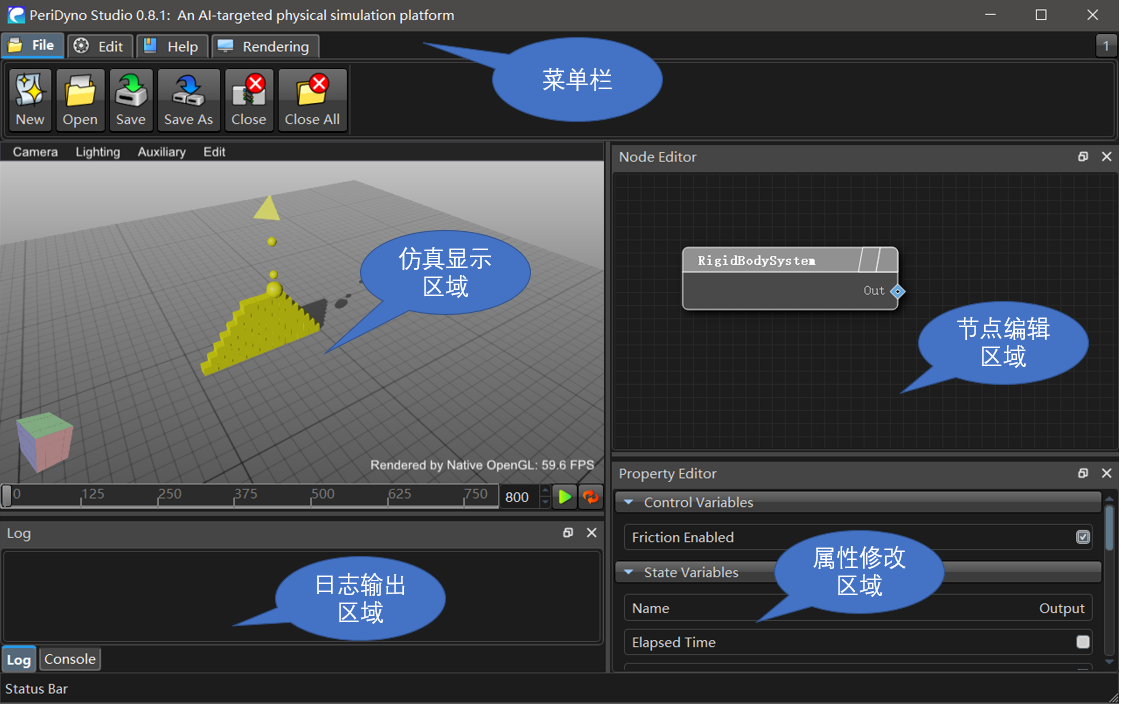
PeriDyno引擎中交互式设计Qt框架以Qt组件为基础,在仿真界面的基础上额外添加了许多组件,包括工具栏、日志栏、节点编辑区域,节点属性编辑区域以及模块编辑区域等。交互式设计Qt框架在安装部署时需要额外安装Qt组件,具备比GLFW框架更强大的交互功能,适用于工程开发人员。用户可以在节点编辑器中创建仿真节点,在节点属性编辑器中更改节点属性,在模块编辑界面编辑功能模块,方便用户搭建复杂场景以及二次开发与集成。在PeriDyno引擎中以Qt平台运行的示例均以Qt开头。
界面介绍:
- 菜单栏:菜单栏提供常见的功能,包括新建、打开、保存以及关闭场景图等功能。同时允许用户自定义功能以插件的形式导入菜单栏;
- 仿真显示区域:将仿真结果可视化;
- 日志输出区域:输出系统日志以及程序相关运行结果;
- 节点编辑区域:提供场景图和节点编辑功能,允许用户通过节点连接的方式创建仿真任务;
- 属性修改区域:对指定节点属性进行修改。
操作说明:
-
菜单栏:鼠标左键点击对应的功能;
-
仿真显示区域:请参考GLFW界面操作方法;
-
开始仿真和重置:刻度表示当前帧数;数字表示最大帧数;绿色按钮点击开始仿真,点击之后会变成暂停键;红色按钮点击重新开始仿真;

-
日志输出区域:打印输出信息。默认不输出日志信息,如需要输出日志信息,点击菜单栏Edite->Logging选项卡。其中Node节点和Module模块的输出信息,只需要勾选Auxiliary中的Print Node Info和Print Module Info选项;
-
节点编辑区域:
- 创建仿真节点: 鼠标右键,选择相应的节点;
- 删除节点: 点击待删除的节点,按键盘delete键;
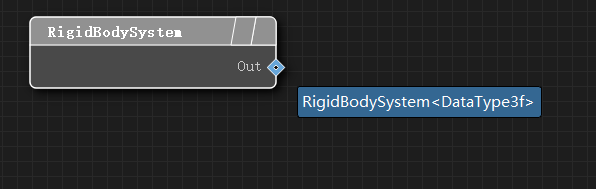
- 节点连接: 鼠标左键拖动。注意每个节点接口都有自己定义的类型,不同类型的接口无法连接;将鼠标放到接口旁边会显示接口信息;
- 节点排序: 当节点过多的时候,点击菜单栏Help->ReOrder选项卡,节点将自动排序;
- 模块信息: 双击场景图中的节点,例如双击RigidBodySystem节点,其模块信息如下:
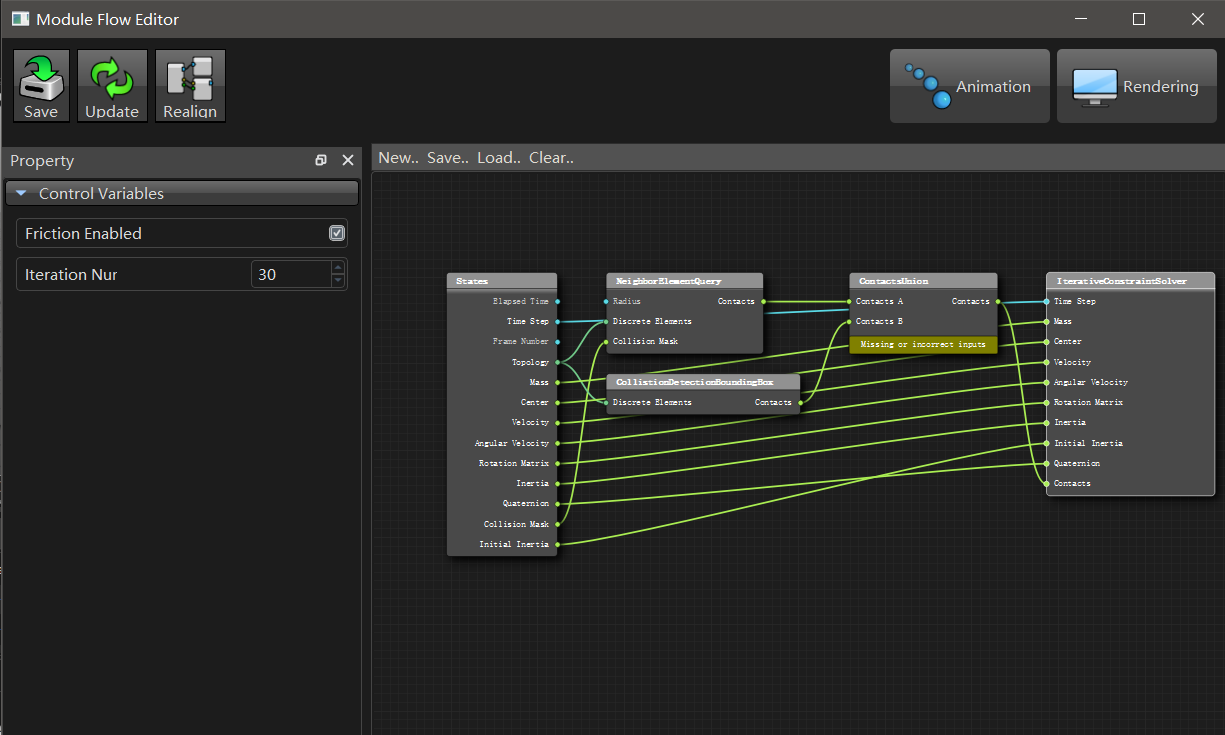
-
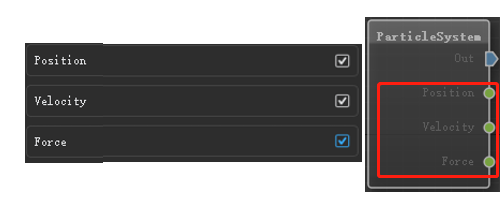
属性修改区域:点击节点,可以修改节点属性:
- Control Variable:控制变量属性,包括int、float、Vertor、bool等类型的数据;
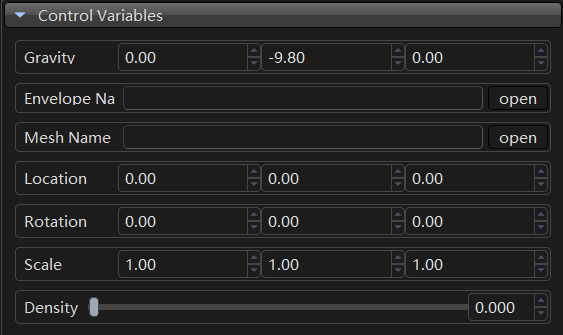
- State Variable:状态变量数据。勾选后,节点会显示相应的状态数据。
- Control Variable:控制变量属性,包括int、float、Vertor、bool等类型的数据;
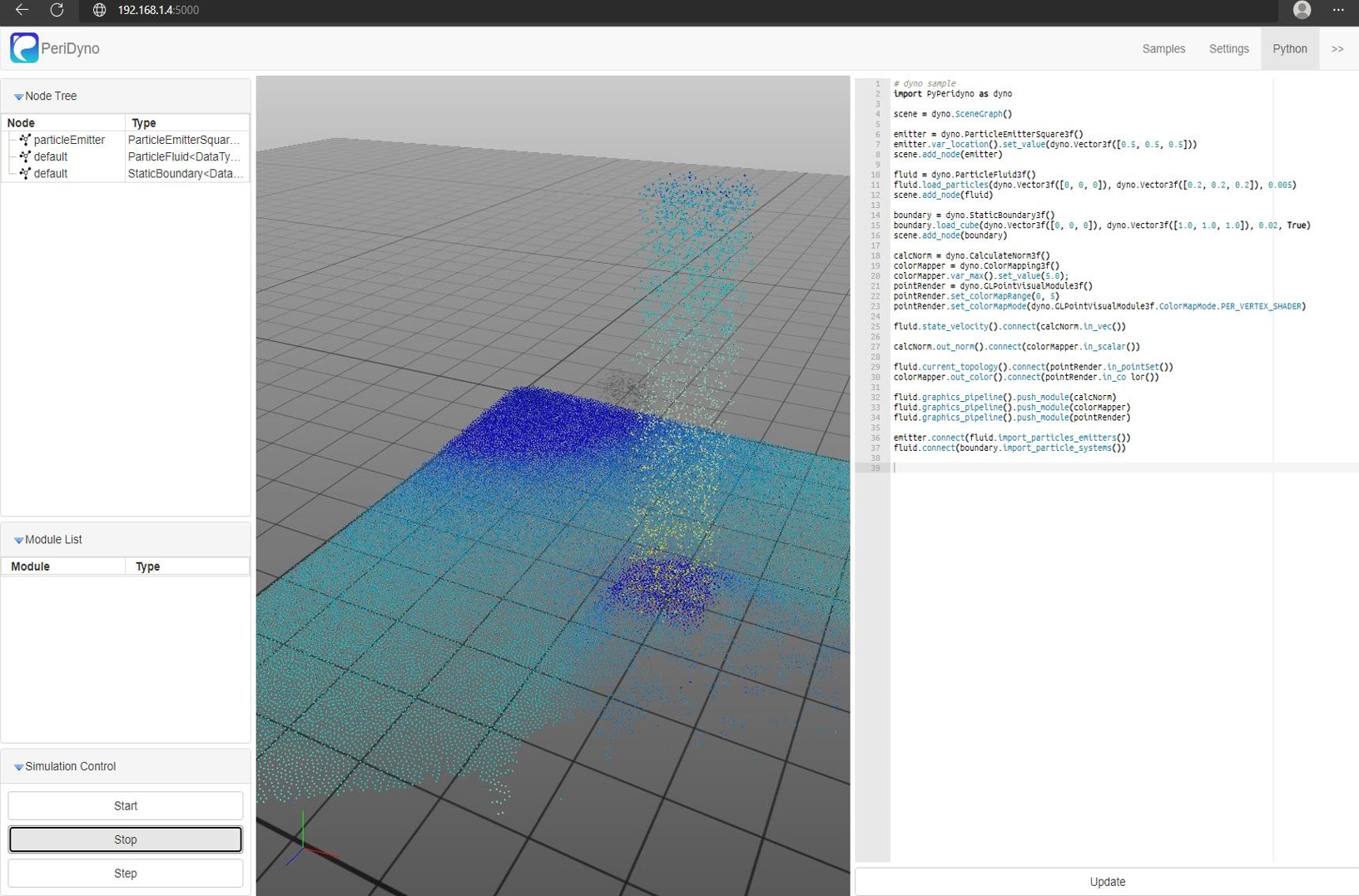
3、端云协同WT平台
简介: WT是一个针对Web应用开发的C++ widget库,同时也是开发和部署web应用的服务器。WT应用模型和现存的GUI库(例如微软的MFC或者TrolTech的Qt)很相似。WT web应用服务器占用较低的内存,因此可以提供基于web的图形用户界面(GUI)。
PeriDyno引擎中端云协同WT平台需要额外配置云端服务器,通过视频流的形式将仿真结果从服务器传到用户浏览器中,适用于工程应用人员。端云协同WT框架中,支持Python语言,用户不需要搭建复杂的仿真环境。