 |
PeriDyno 1.2.1
|
Loading...
Searching...
No Matches
|
PeriDyno 1.2.1
|
#include "Array/ArrayList.h"#include "STL/Pair.h"#include "Matrix/Transform3x3.h"#include "Collision/CollisionData.h"#include "Topology/DiscreteElements.h"#include "Algorithm/Reduction.h"#include "Collision/Attribute.h"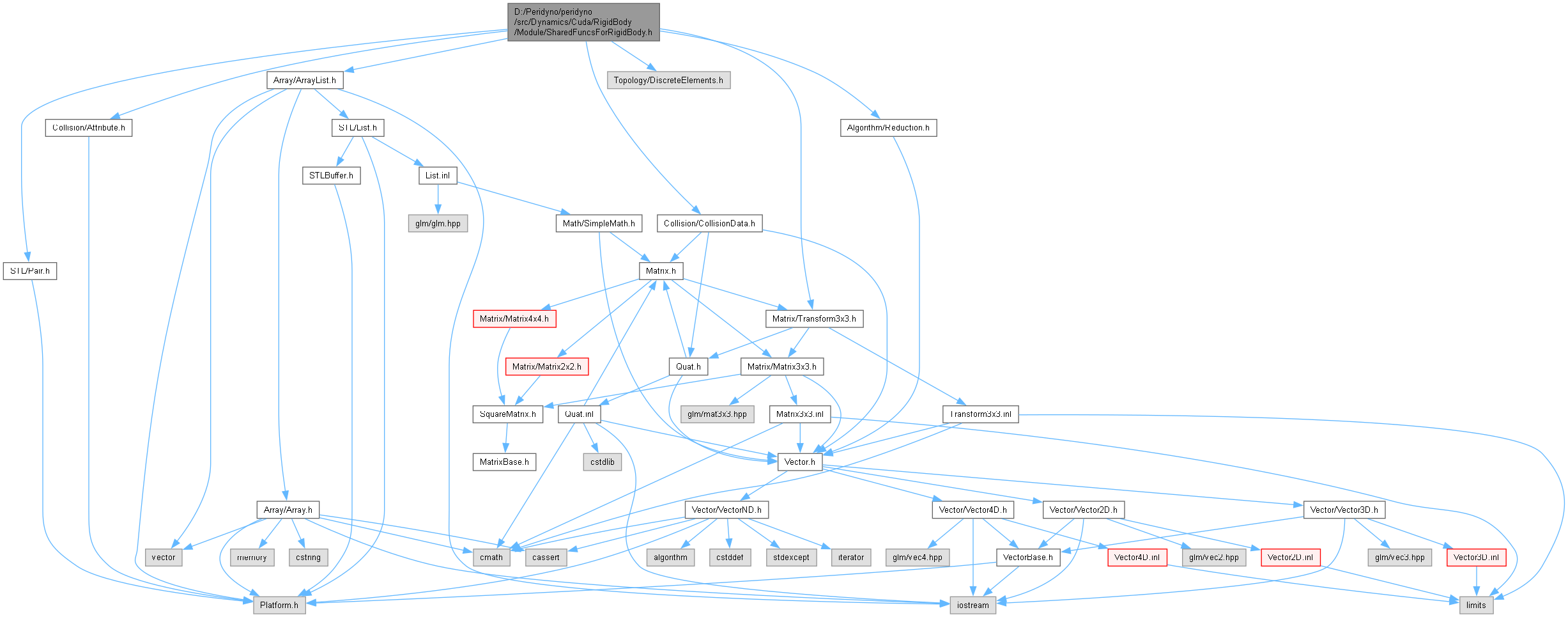
Go to the source code of this file.
Namespaces | |
| namespace | dyno |
| This is an implementation of AdditiveCCD based on peridyno. | |
Functions | |
| void | dyno::ApplyTransform (DArrayList< Transform3f > &instanceTransform, const DArray< Vec3f > &translate, const DArray< Mat3f > &rotation, const DArray< Pair< uint, uint > > &binding, const DArray< int > &bindingtag) |
| void | dyno::updateVelocity (DArray< Attribute > attribute, DArray< Vec3f > velocity, DArray< Vec3f > angular_velocity, DArray< Vec3f > impulse, float linearDamping, float angularDamping, float dt) |
| void | dyno::updateGesture (DArray< Attribute > attribute, DArray< Vec3f > pos, DArray< Quat1f > rotQuat, DArray< Mat3f > rotMat, DArray< Mat3f > inertia, DArray< Vec3f > velocity, DArray< Vec3f > angular_velocity, DArray< Mat3f > inertia_init, float dt) |
| void | dyno::updatePositionAndRotation (DArray< Vec3f > pos, DArray< Quat1f > rotQuat, DArray< Mat3f > rotMat, DArray< Mat3f > inertia, DArray< Mat3f > inertia_init, DArray< Vec3f > impulse_constrain) |
| void | dyno::calculateContactPoints (DArray< TContactPair< float > > contacts, DArray< int > contactCnt) |
| void | dyno::calculateJacobianMatrix (DArray< Vec3f > J, DArray< Vec3f > B, DArray< Vec3f > pos, DArray< Mat3f > inertia, DArray< float > mass, DArray< Mat3f > rotMat, DArray< TConstraintPair< float > > constraints) |
| void | dyno::calculateJacobianMatrixForNJS (DArray< Vec3f > J, DArray< Vec3f > B, DArray< Vec3f > pos, DArray< Mat3f > inertia, DArray< float > mass, DArray< Mat3f > rotMat, DArray< TConstraintPair< float > > constraints) |
| void | dyno::calculateEtaVectorForPJS (DArray< float > eta, DArray< Vec3f > J, DArray< Vec3f > velocity, DArray< Vec3f > angular_velocity, DArray< TConstraintPair< float > > constraints) |
| void | dyno::calculateEtaVectorForPJSBaumgarte (DArray< float > eta, DArray< Vec3f > J, DArray< Vec3f > velocity, DArray< Vec3f > angular_velocity, DArray< Vec3f > pos, DArray< Quat1f > rotation_q, DArray< TConstraintPair< float > > constraints, DArray< float > errors, float slop, float beta, uint substepping, float dt) |
| void | dyno::calculateEtaVectorWithERP (DArray< float > eta, DArray< Vec3f > J, DArray< Vec3f > velocity, DArray< Vec3f > angular_velocity, DArray< Vec3f > pos, DArray< Quat1f > rotation_q, DArray< TConstraintPair< float > > constraints, DArray< float > ERP, float slop, float dt) |
| void | dyno::calculateEtaVectorForPJSoft (DArray< float > eta, DArray< Vec3f > J, DArray< Vec3f > velocity, DArray< Vec3f > angular_velocity, DArray< Vec3f > pos, DArray< Quat1f > rotation_q, DArray< TConstraintPair< float > > constraints, float slop, float zeta, float hertz, float substepping, float dt) |
| void | dyno::calculateEtaVectorForNJS (DArray< float > eta, DArray< Vec3f > J, DArray< Vec3f > pos, DArray< Quat1f > rotation_q, DArray< TConstraintPair< float > > constraints, float slop, float beta) |
| void | dyno::setUpContactsInLocalFrame (DArray< TContactPair< float > > contactsInLocalFrame, DArray< TContactPair< float > > contactsInGlobalFrame, DArray< Vec3f > pos, DArray< Mat3f > rotMat) |
| void | dyno::setUpContactAndFrictionConstraints (DArray< TConstraintPair< float > > constraints, DArray< TContactPair< float > > contactsInLocalFrame, DArray< Vec3f > pos, DArray< Mat3f > rotMat, bool hasFriction) |
| void | dyno::setUpContactConstraints (DArray< TConstraintPair< float > > constraints, DArray< TContactPair< float > > contactsInLocalFrame, DArray< Vec3f > pos, DArray< Mat3f > rotMat) |
| void | dyno::setUpBallAndSocketJointConstraints (DArray< TConstraintPair< float > > constraints, DArray< BallAndSocketJoint< float > > joints, DArray< Vec3f > pos, DArray< Mat3f > rotMat, int begin_index) |
| void | dyno::setUpSliderJointConstraints (DArray< TConstraintPair< float > > constraints, DArray< SliderJoint< float > > joints, DArray< Vec3f > pos, DArray< Mat3f > rotMat, DArray< Quat1f > rotQuat, int begin_index) |
| void | dyno::setUpHingeJointConstraints (DArray< TConstraintPair< float > > constraints, DArray< HingeJoint< float > > joints, DArray< Vec3f > pos, DArray< Mat3f > rotMat, DArray< Quat1f > rotation_q, int begin_index) |
| void | dyno::setUpFixedJointConstraints (DArray< TConstraintPair< float > > &constraints, DArray< FixedJoint< float > > &joints, DArray< Mat3f > &rotMat, DArray< Quat1f > &rotQuat, int begin_index) |
| void | dyno::setUpPointJointConstraints (DArray< TConstraintPair< float > > constraints, DArray< PointJoint< float > > joints, DArray< Vec3f > pos, int begin_index) |
| void | dyno::calculateK (DArray< TConstraintPair< float > > constraints, DArray< Vec3f > J, DArray< Vec3f > B, DArray< Vec3f > pos, DArray< Mat3f > inertia, DArray< float > mass, DArray< float > K_1, DArray< Mat2f > K_2, DArray< Mat3f > K_3) |
| void | dyno::calculateKWithCFM (DArray< TConstraintPair< float > > constraints, DArray< Vec3f > J, DArray< Vec3f > B, DArray< Vec3f > pos, DArray< Mat3f > inertia, DArray< float > mass, DArray< float > K_1, DArray< Mat2f > K_2, DArray< Mat3f > K_3, DArray< float > CFM) |
| void | dyno::JacobiIteration (DArray< float > lambda, DArray< Vec3f > impulse, DArray< Vec3f > J, DArray< Vec3f > B, DArray< float > eta, DArray< TConstraintPair< float > > constraints, DArray< int > nbq, DArray< float > K_1, DArray< Mat2f > K_2, DArray< Mat3f > K_3, DArray< float > mass, DArray< float > fricCoeffs, float mu, float g, float dt) |
| void | dyno::JacobiIterationForCFM (DArray< float > lambda, DArray< Vec3f > impulse, DArray< Vec3f > J, DArray< Vec3f > B, DArray< float > eta, DArray< TConstraintPair< float > > constraints, DArray< int > nbq, DArray< float > K_1, DArray< Mat2f > K_2, DArray< Mat3f > K_3, DArray< float > mass, DArray< float > CFM, float mu, float g, float dt) |
| void | dyno::JacobiIterationStrict (DArray< float > lambda, DArray< Vec3f > impulse, DArray< Vec3f > J, DArray< Vec3f > B, DArray< float > eta, DArray< TConstraintPair< float > > constraints, DArray< int > nbq, DArray< float > d, DArray< float > mass, float mu, float g, float dt) |
| void | dyno::JacobiIterationForSoft (DArray< float > lambda, DArray< Vec3f > impulse, DArray< Vec3f > J, DArray< Vec3f > B, DArray< float > eta, DArray< TConstraintPair< float > > constraints, DArray< int > nbq, DArray< float > K_1, DArray< Mat2f > K_2, DArray< Mat3f > K_3, DArray< float > mass, DArray< float > mu, float g, float dt, float zeta, float hertz) |
| void | dyno::JacobiIterationForNJS (DArray< float > lambda, DArray< Vec3f > impulse, DArray< Vec3f > J, DArray< Vec3f > B, DArray< float > eta, DArray< TConstraintPair< float > > constraints, DArray< int > nbq, DArray< float > K_1, DArray< Mat2f > K_2, DArray< Mat3f > K_3) |
| void | dyno::setUpGravity (DArray< Vec3f > impulse_ext, float g, float dt) |
| Real | dyno::checkOutError (DArray< Vec3f > J, DArray< Vec3f > mImpulse, DArray< TConstraintPair< float > > constraints, DArray< float > eta) |
| void | dyno::calculateDiagnals (DArray< float > d, DArray< Vec3f > J, DArray< Vec3f > B) |
| void | dyno::preConditionJ (DArray< Vec3f > J, DArray< float > d, DArray< float > eta) |
| bool | dyno::saveVectorToFile (const std::vector< float > &vec, const std::string &filename) |
| void | dyno::calculateEtaVectorForRelaxation (DArray< float > eta, DArray< Vec3f > J, DArray< Vec3f > velocity, DArray< Vec3f > angular_velocity, DArray< TConstraintPair< float > > constraints) |
| double | dyno::checkOutErrors (DArray< float > errors) |
| void | dyno::calculateMatrixA (DArray< Vec3f > &J, DArray< Vec3f > &B, DArray< float > &A, DArray< TConstraintPair< float > > &constraints, float k) |
| bool | dyno::saveMatrixToFile (DArray< float > &Matrix, int n, const std::string &filename) |
| bool | dyno::saveVectorToFile (DArray< float > &vec, const std::string &filename) |
| void | dyno::vectorSub (DArray< float > &ans, DArray< float > &subtranhend, DArray< float > &minuend, DArray< TConstraintPair< float > > &constraints) |
| void | dyno::vectorAdd (DArray< float > &ans, DArray< float > &v1, DArray< float > &v2, DArray< TConstraintPair< float > > &constraints) |
| void | dyno::vectorMultiplyScale (DArray< float > &ans, DArray< float > &initialVec, float scale, DArray< TConstraintPair< float > > &constraints) |
| void | dyno::vectorClampSupport (DArray< float > v, DArray< TConstraintPair< float > > constraints) |
| void | dyno::vectorClampFriction (DArray< float > v, DArray< TConstraintPair< float > > constraints, int contact_size, float mu) |
| void | dyno::matrixMultiplyVec (DArray< Vec3f > &J, DArray< Vec3f > &B, DArray< float > &lambda, DArray< float > &ans, DArray< TConstraintPair< float > > &constraints, int bodyNum) |
| float | dyno::vectorNorm (DArray< float > &a, DArray< float > &b) |
| void | dyno::vectorMultiplyVector (DArray< float > &v1, DArray< float > &v2, DArray< float > &ans, DArray< TConstraintPair< float > > &constraints) |
| void | dyno::calculateImpulseByLambda (DArray< float > lambda, DArray< TConstraintPair< float > > constraints, DArray< Vec3f > impulse, DArray< Vec3f > B) |
| void | dyno::preconditionedResidual (DArray< float > &residual, DArray< float > &ans, DArray< float > &k_1, DArray< Mat2f > &k_2, DArray< Mat3f > &k_3, DArray< TConstraintPair< float > > &constraints) |
| void | dyno::buildCFMAndERP (DArray< Vec3f > J, DArray< Vec3f > B, DArray< TConstraintPair< float > > constraints, DArray< float > CFM, DArray< float > ERP, float hertz, float zeta, float dt) |
| void | dyno::calculateLinearSystemLHS (DArray< Vec3f > &J, DArray< Vec3f > &B, DArray< Vec3f > &impulse, DArray< float > &lambda, DArray< float > &ans, DArray< float > &CFM, DArray< TConstraintPair< float > > &constraints) |