|
| | MultibodySystem () |
| |
| | ~MultibodySystem () override |
| |
| | DEF_VAR (std::vector< Transform3f >, VehiclesTransform, std::vector< Transform3f >{Transform3f()}, "") |
| | Creates multiple vehicles and specifies the transformations for each vehicle.
|
| |
| | DEF_INSTANCE_IN (TriangleSet< TDataType >, TriangleSet, "TriangleSet of the boundary") |
| |
| | DEF_NODE_PORTS (RigidBodySystem< TDataType >, Vehicle, "") |
| |
| | DEF_ARRAYLIST_STATE (Transform3f, InstanceTransform, DeviceType::GPU, "Instance transforms") |
| |
 Public Member Functions inherited from dyno::RigidBodySystem< TDataType > Public Member Functions inherited from dyno::RigidBodySystem< TDataType > |
| | RigidBodySystem () |
| |
| | ~RigidBodySystem () override |
| |
| std::shared_ptr< PdActor > | addBox (const BoxInfo &box, const RigidBodyInfo &bodyDef, const Real density=Real(100)) |
| |
| std::shared_ptr< PdActor > | addSphere (const SphereInfo &sphere, const RigidBodyInfo &bodyDef, const Real density=Real(100)) |
| |
| std::shared_ptr< PdActor > | addTet (const TetInfo &tet, const RigidBodyInfo &bodyDef, const Real density=Real(100)) |
| |
| std::shared_ptr< PdActor > | addCapsule (const CapsuleInfo &capsule, const RigidBodyInfo &bodyDef, const Real density=Real(100)) |
| |
| std::shared_ptr< PdActor > | createRigidBody (const Coord &p, const TQuat &q) |
| |
| std::shared_ptr< PdActor > | createRigidBody (const RigidBodyInfo &bodyDef) |
| |
| void | bindBox (const std::shared_ptr< PdActor > actor, const BoxInfo &box, const Real density=Real(100)) |
| |
| void | bindSphere (const std::shared_ptr< PdActor > actor, const SphereInfo &sphere, const Real density=Real(100)) |
| |
| void | bindCapsule (const std::shared_ptr< PdActor > actor, const CapsuleInfo &capsule, const Real density=Real(100)) |
| |
| void | bindTet (const std::shared_ptr< PdActor > actor, const TetInfo &tet, const Real density=Real(100)) |
| |
| BallAndSocketJoint & | createBallAndSocketJoint (std::shared_ptr< PdActor > actor1, std::shared_ptr< PdActor > actor2) |
| |
| SliderJoint & | createSliderJoint (std::shared_ptr< PdActor > actor1, std::shared_ptr< PdActor > actor2) |
| |
| HingeJoint & | createHingeJoint (std::shared_ptr< PdActor > actor1, std::shared_ptr< PdActor > actor2) |
| |
| FixedJoint & | createFixedJoint (std::shared_ptr< PdActor > actor1, std::shared_ptr< PdActor > actor2) |
| |
| FixedJoint & | createUnilateralFixedJoint (std::shared_ptr< PdActor > actor1) |
| |
| PointJoint & | createPointJoint (std::shared_ptr< PdActor > actor1) |
| |
| Mat3f | pointInertia (Coord v1) |
| |
| std::string | getNodeType () override |
| |
| | DEF_VAR (bool, FrictionEnabled, true, "A toggle to control the friction") |
| |
| | DEF_VAR (bool, GravityEnabled, true, "A toggle to control the gravity") |
| |
| | DEF_VAR (Real, GravityValue, 9.8, "") |
| |
| | DEF_VAR (Real, FrictionCoefficient, 200, "") |
| |
| | DEF_VAR (Real, Slop, 0.0001, "") |
| |
| | DEF_INSTANCE_STATE (DiscreteElements< TDataType >, Topology, "Topology") |
| |
| | DEF_ARRAY_STATE (Real, FrictionCoefficients, DeviceType::GPU, "FrictionCoefficients of rigid bodies") |
| |
| | DEF_ARRAY_STATE (Real, Mass, DeviceType::GPU, "Mass of rigid bodies") |
| | Rigid Mass.
|
| |
| | DEF_ARRAY_STATE (Coord, Center, DeviceType::GPU, "Center of rigid bodies") |
| | Rigid Position.
|
| |
| | DEF_ARRAY_STATE (Coord, Velocity, DeviceType::GPU, "Velocity of rigid bodies") |
| | Rigid Velocity.
|
| |
| | DEF_ARRAY_STATE (Coord, AngularVelocity, DeviceType::GPU, "Angular velocity of rigid bodies") |
| | Rigid Angular Velocity.
|
| |
| | DEF_ARRAY_STATE (Matrix, RotationMatrix, DeviceType::GPU, "Rotation matrix of rigid bodies") |
| | Rigid Rotation.
|
| |
| | DEF_ARRAY_STATE (Matrix, Inertia, DeviceType::GPU, "Inertia matrix") |
| |
| | DEF_ARRAY_STATE (TQuat, Quaternion, DeviceType::GPU, "Quaternion") |
| |
| | DEF_ARRAY_STATE (CollisionMask, CollisionMask, DeviceType::GPU, "Collision mask for each rigid body") |
| |
| | DEF_ARRAY_STATE (Attribute, Attribute, DeviceType::GPU, "Rigid body attributes") |
| |
| | DEF_ARRAY_STATE (Matrix, InitialInertia, DeviceType::GPU, "Initial inertia matrix") |
| |
| int | getSamplingPointSize () |
| |
| DArray2D< Vec3f > | getSamples () |
| |
| DArray2D< Vec3f > | getNormals () |
| |
| | Node () |
| |
| | ~Node () override |
| |
| void | setName (std::string name) |
| |
| std::string | getName () override |
| |
| bool | isAutoSync () |
| |
| bool | isAutoHidden () |
| |
| void | setAutoSync (bool con) |
| | Whether the node can be automatically synchronized when its ancestor is updated.
|
| |
| void | setAutoHidden (bool con) |
| |
| virtual bool | isActive () |
| | Check the state of dynamics.
|
| |
| virtual void | setActive (bool active) |
| | Set the state of dynamics.
|
| |
| virtual bool | isVisible () |
| | Check the visibility of context.
|
| |
| virtual void | setVisible (bool visible) |
| | Set the visibility of context.
|
| |
| virtual Real | getDt () |
| | Simulation timestep.
|
| |
| void | setDt (Real dt) |
| |
| void | setSceneGraph (SceneGraph *scn) |
| |
| SceneGraph * | getSceneGraph () |
| |
| std::vector< NodePort * > & | getImportNodes () |
| |
| std::vector< NodePort * > & | getExportNodes () |
| |
| bool | addModule (std::shared_ptr< Module > module) |
| | Add a module to m_module_list and other special module lists.
|
| |
| bool | deleteModule (std::shared_ptr< Module > module) |
| |
| template<class TModule> |
| bool | addModule (std::shared_ptr< TModule > tModule) |
| | Add a speical kind of module.
|
| |
| template<class TModule> |
| bool | deleteModule (std::shared_ptr< TModule > tModule) |
| |
| std::list< std::shared_ptr< Module > > & | getModuleList () |
| |
| bool | hasModule (std::string name) |
| |
| std::shared_ptr< Module > | getModule (std::string name) |
| | Get a module by its name.
|
| |
| template<class TModule> |
| std::shared_ptr< TModule > | getModule () |
| | Get the Module by the module class name.
|
| |
| template<class TModule> |
| std::shared_ptr< TModule > | getModule (std::string name) |
| |
| std::shared_ptr< Pipeline > | resetPipeline () |
| |
| std::shared_ptr< AnimationPipeline > | animationPipeline () |
| |
| std::shared_ptr< GraphicsPipeline > | graphicsPipeline () |
| |
| template<class TModule> |
| std::shared_ptr< TModule > | addModule (std::string name) |
| |
| void | update () |
| | Called every time interval.
|
| |
| void | updateGraphicsContext () |
| |
| void | reset () |
| |
| virtual NBoundingBox | boundingBox () |
| |
| bool | connect (NodePort *nPort) |
| | Depth-first tree traversal.
|
| |
| bool | disconnect (NodePort *nPort) |
| |
| bool | attachField (FBase *field, std::string name, std::string desc, bool autoDestroy=true) override |
| | Attach a field to Node.
|
| |
| std::vector< NodePort * > & | getAllNodePorts () |
| |
| uint | sizeOfNodePorts () |
| |
| uint | sizeOfImportNodes () const |
| |
| uint | sizeOfExportNodes () const |
| |
| void | setForceUpdate (bool b) |
| |
| | DEF_VAR_STATE (Real, ElapsedTime, 0, "Elapsed Time") |
| |
| | DEF_VAR_STATE (Real, TimeStep, Real(0.033), "Time step size") |
| |
| | DEF_VAR_STATE (uint, FrameNumber, 0, "Frame number") |
| |
| | OBase () |
| |
| | ~OBase () override |
| |
| virtual std::string | caption () |
| | Return the caption.
|
| |
| virtual bool | captionVisible () |
| | Whether to hide the caption in the GUI.
|
| |
| virtual std::string | description () |
| | Return a description for the node or module, override this function to support user-defined description.
|
| |
| bool | addField (FBase *data) |
| | Add a field to Base FieldID will be set to the name of Field by default.
|
| |
| bool | addField (FieldID name, FBase *data) |
| | Add a field to Base.
|
| |
| bool | addFieldAlias (FieldID name, FBase *data) |
| |
| bool | addFieldAlias (FieldID name, FBase *data, FieldMap &fieldAlias) |
| |
| bool | findField (FBase *data) |
| | Find a field by its pointer.
|
| |
| bool | findFieldAlias (const FieldID name) |
| | Find a field by its name.
|
| |
| bool | findFieldAlias (const FieldID name, FieldMap &fieldAlias) |
| | Find a field in fieldAlias by its name This function is typically called by other functions.
|
| |
| bool | removeField (FBase *data) |
| | Remove a field by its pointer.
|
| |
| bool | removeFieldAlias (const FieldID name) |
| | Remove a field by its name.
|
| |
| bool | removeFieldAlias (const FieldID name, FieldMap &fieldAlias) |
| |
| FBase * | getField (const FieldID name) |
| | Return a field by its name.
|
| |
| std::vector< FBase * > & | getAllFields () |
| |
| template<typename T> |
| T * | getField (FieldID name) |
| |
| bool | isAllFieldsReady () |
| | Check the completeness of all required fields.
|
| |
| std::vector< FieldID > | getFieldAlias (FBase *data) |
| |
| int | getFieldAliasCount (FBase *data) |
| |
| void | setBlockCoord (float x, float y) |
| |
| float | bx () |
| |
| float | by () |
| |
| bool | findInputField (FBase *field) |
| |
| bool | addInputField (FBase *field) |
| |
| bool | removeInputField (FBase *field) |
| |
| std::vector< FBase * > & | getInputFields () |
| |
| bool | findOutputField (FBase *field) |
| |
| bool | addOutputField (FBase *field) |
| |
| bool | addToOutput (FBase *field) |
| |
| bool | removeOutputField (FBase *field) |
| |
| bool | removeFromOutput (FBase *field) |
| |
| std::vector< FBase * > & | getOutputFields () |
| |
| bool | findParameter (FBase *field) |
| |
| bool | addParameter (FBase *field) |
| |
| bool | removeParameter (FBase *field) |
| |
| std::vector< FBase * > & | getParameters () |
| |
| | Object () |
| |
| virtual | ~Object () |
| |
| ObjectId | objectId () |
| |
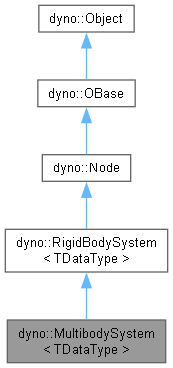
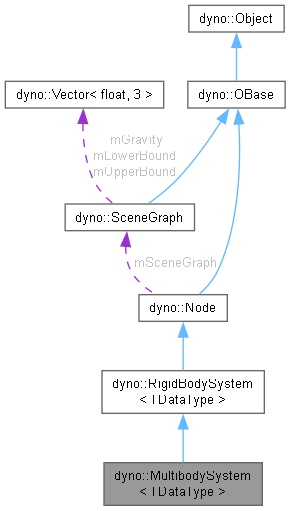
template<typename TDataType>
class dyno::MultibodySystem< TDataType >
Definition at line 25 of file MultibodySystem.h.